I thought I will share one of my recent problematic experience with VTOL tiltrotor and the remedial steps I am taking to solve this problem (in hopes that it’ll help you). We are currently in the process of testing one of our long-range tiltrotor quadplane builds (for commercial purpose), but it’s not really a Nimbus VTOL conversion - see picture attached.
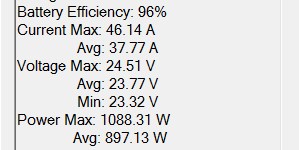
With an AUW of about 5.2 kg, the initial hover drew under 30A (which is good). However, when we inspected the flight log, it was pretty clear that the two (VTOL) low-kv rear motors were working relatively harder (and at some point, one of them was even saturated due to the yaw it was fighting at the time), but the front tilting motors were not working nearly as hard. However, I know for a fact the our front (tilting) motors are capable to supplying up to 4kg of thrust (each), but the rear motors, on the other hand, although very efficient, can only produce up to about 2.4kg of thrust (each).
So here’s what I am doing to solve this problem: I am decreasing the lever arm of the front tilting motors - that way the front motors can do a fair bit more of load carrying (for the same turning effect they cause) - I hope I made myself clear. In your case, like Greg suggested, it may the location of the CG relative to the front and rear motors combined with your front motor/prop combo. If this is the problem, you could perhaps either go up on the front motor size to something like 3520 and/or even better if you could make the distance from the front motor to the CG a big longer.
I saw something like the Mugin at the Foxtech factory in Tianjin. They had a couple of different sizes. A local customer came to take delivery of a 2 meter plane while we were in our training class.
Thanks Wasim, nice plane, what airframe is that? All our motors and config are standard Foxtech V1 which I think are OK, could get some more power from the front motors by increasing the prop size if necessary but I think they’re OK. The plane is flying and hovering very well at the moment, just seeing if we can eke out the best duration with the least compromise.
It’s an extensively modified and reinforced Believer platform. The focus was on improving the aerodynamics, and increasing the payload and/or battery capacity and internal space. We’re probably going to push its AUW past 7kg (once the weather becomes favourable over here).
If it flies okay, I would recommend leaving it as it is for the following reason: Increasing the prop size will raise your hover current even more. Also, going for something like 14x8 props is likely going to result in a lower cruise performance (assuming you’re currently using 13x8 props). In our plane, for example, we’re using 13x8 props but the chances are that we will replace them with 12x8 props for endurance testing (provided it takes off fine with the latter on a nice calm day). By the way, I am just wondering if you managed to ask Foxtech about their hover current with the V1 setup? That would be interesting.
And ohhhh, just worth doing a quick sanity check: Check if you’ve installed THE RIGHT PROPS THE RIGHT WAY ROUND. As silly as it may sound, even Tridge faced a similar problem when he was baffled by a high hover current draw and it turns out that he has fitted one of the props the wrong way round. It can happen to anyone.
Foxtech sells them under the Eagle Hero and Hunter names. Their smaller predecessors, the SkyHunter series, required you to keep them assembled. These larger versions require considerable assembly and disassembly at the field. Nothing seems to come close to the Nimbus plug and lock design which requires no tools and has no loose parts.
Thanks Greg! We had a great time at the Foxtech ‘factory’. Nice folks. I took some basic mission planner training from their Chief Test Pilot(Hesh). He’s the one that does all the in-house tuning.
Hot tip from Hesh: Always take 4 pictures during startup and ground preflight. Do the first one right after powering up to keep the map02 camera happy.(See Map02 manual). Take 3 more shots after getting a 3D GPS lock. These allow checking hot shoe function and geo tags.
After lunch we had a long flight demo. Would it be a thread hijacking to post a few pictures?
The small battery is a 6S 2200 mah LiPo C80 according to the label. It will run the bird for about three minutes of VTOL. Its enough for a normal takeoff and landing.
Has anyone found a better location than the nose cone for the airspeed sensor and the pitot tube? I would like to put my FPV camera in the nose and need an alternate location for the pitot tube.
Yes, I realize that the current pitot location is as nearly perfect as one could wish for sensing airspeed.
It looks like any place aft of the nose connection bulkhead will get too much propwash. Right now the FPV camera is stuck up on a board on top of the nose. It’s ugly and it must create a lot of drag as well as disturbed airflow.
The only thing that I’ve come up with is swapping the camera and pitot tube locations. I’ll put the foam cover back in place where the board is to restore the airflow.
The pitot tube doesn’t need to be on the nose. In fact, the Nimbus is my only vehicle where it resides there. Depending on the pitot tube used, you may need one of the 3D printed cases to help mount it away from the body like in my mini Talon image below.
I’m still working on the param file difference. We already noted the changes from Graham’s V1 file and your V2 wind resistance parameters so I don’t expect many more.