Hi everyone
Trying to setup my first drone.
I have a raspberry pi 4 and an Emlid Navio 2.
Building a “tank” style rover.
I believe I have everything configured correctly on the PI.
Ardurover is running on the PI.
I can connect over ethernet and the drone is communicating over mission planner.
I intended to use Ethernet to control this guy around my yard, no RC equipment, just IP…
Is this an issue for initial setup?
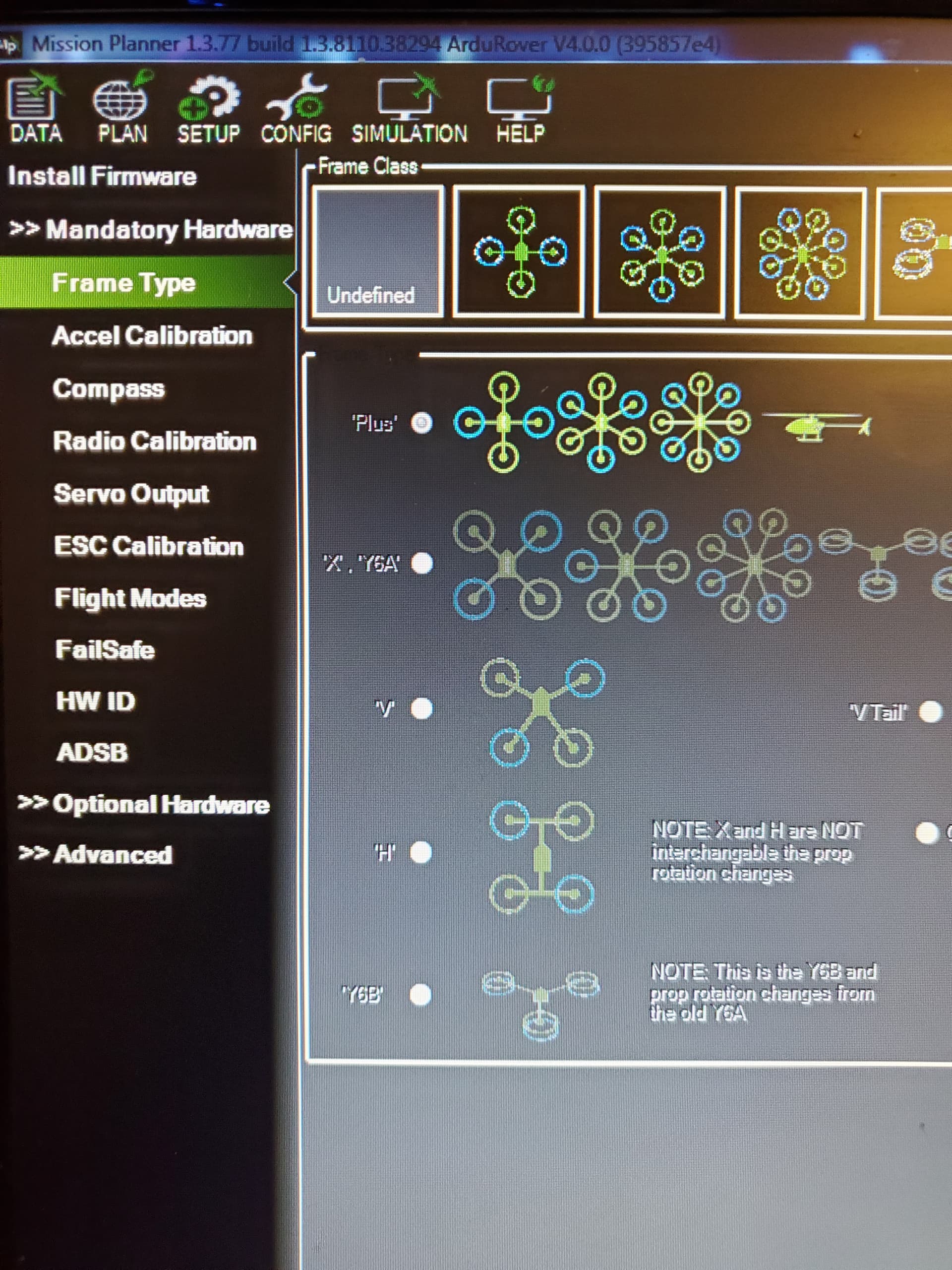
Anyway I can’t select “frame type” when setting up the drone in Mission planner.
I have the latest version Emlid’s ardupilot installed.
I think I am just missing 1 small step and I’ve been fighting this for a few days.
That screen is designed for multirotors. You don’t have one of those. The full parameter list on the config tab will have FRAME_TYPE available, but you really need to leave it at 0 (undefined) unless you have a specific reason to change it.