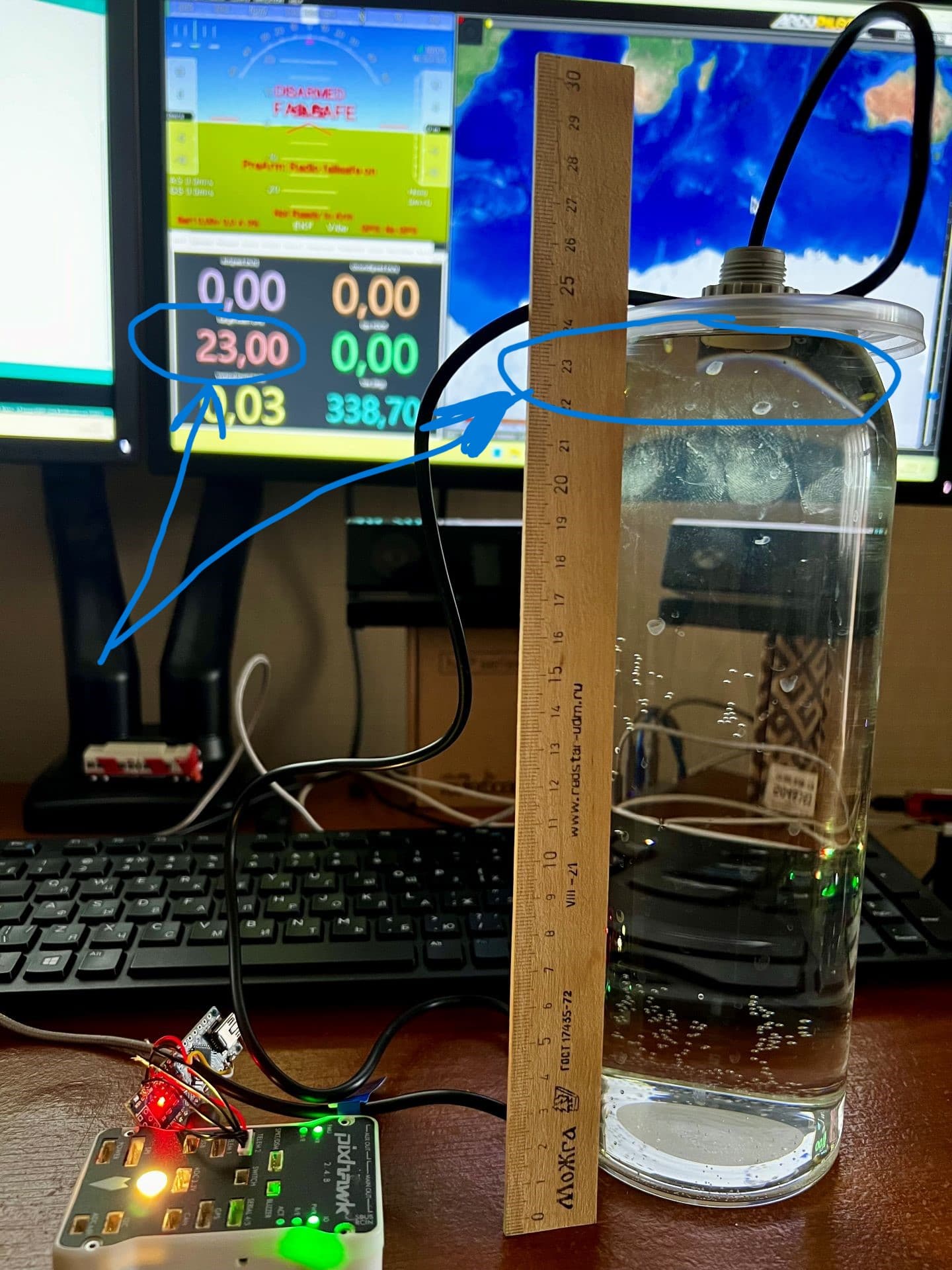
Cheap sonars have appeared on the market, with a range of up to 6m, the minimum distance is 5 cm. I tested them by outputting data in nmea format (the readings are very accurate, as seen in the photo). These models come out under different names: L041MTW, L042MTW,GL041MT,GL042MT. More features on my Github. These sonars can be used in Sub to avoid obstacles. It can also be output via MAVLINK.
Any chance you’d be interested in writing a Lua driver for these sonar to allow removing the need for the external arduino computer? We have two examples of this for other lidar here.
I have this script for it but I havent been able to test it on a H7 controller, when it was made lua rangefinders wasnt a thing so i have added that option that but i havent tested it since.