First time using Ardupilot and I have got myself a bit stuck.
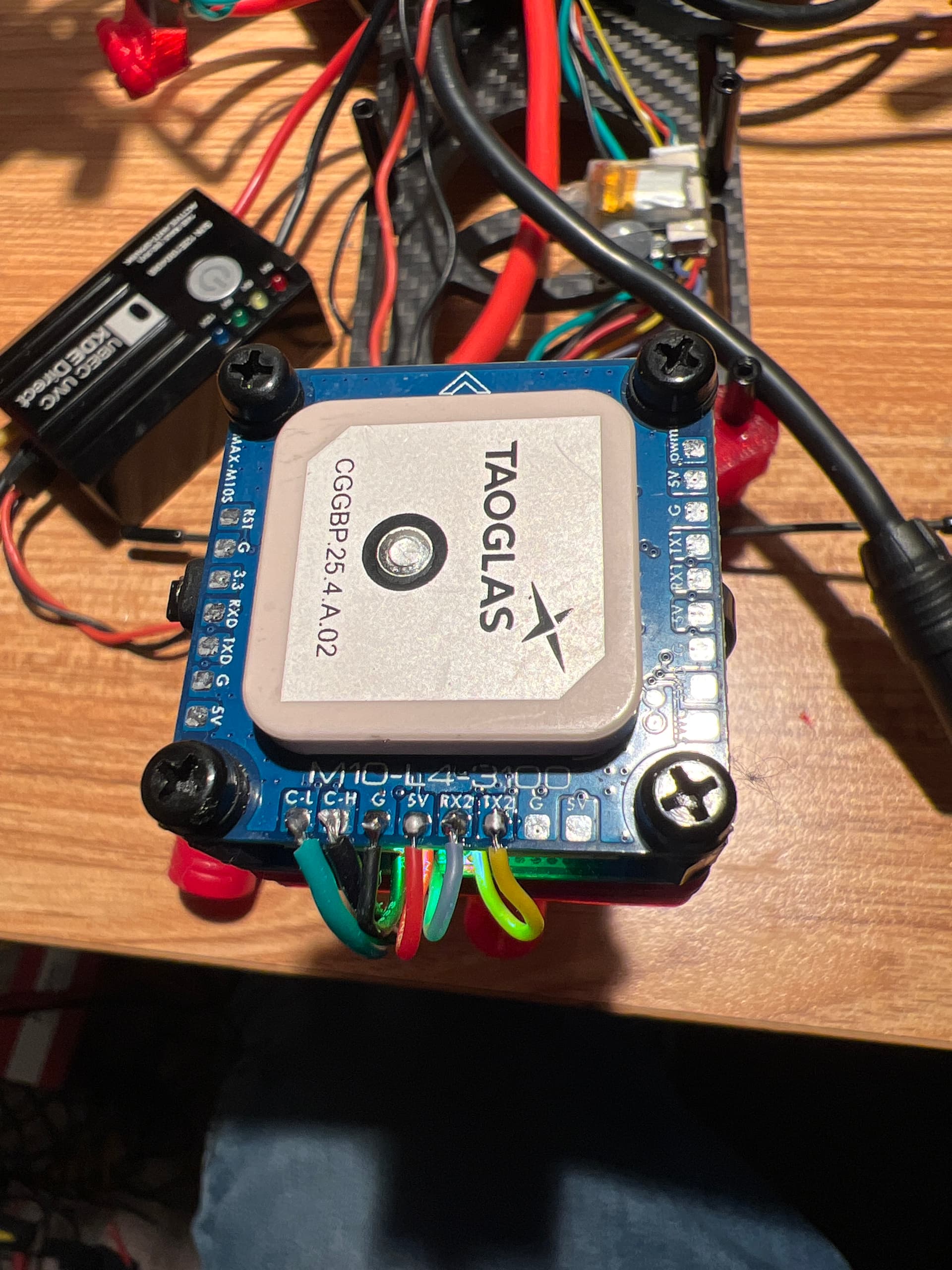
I have removed all the electronics from an old TBS Discovery as I was having wierd video issues so I am replacing it with new hardware - A Matek H743-Wing v3 Flight Controller and a Matek M8Q-5883 GPS unit.
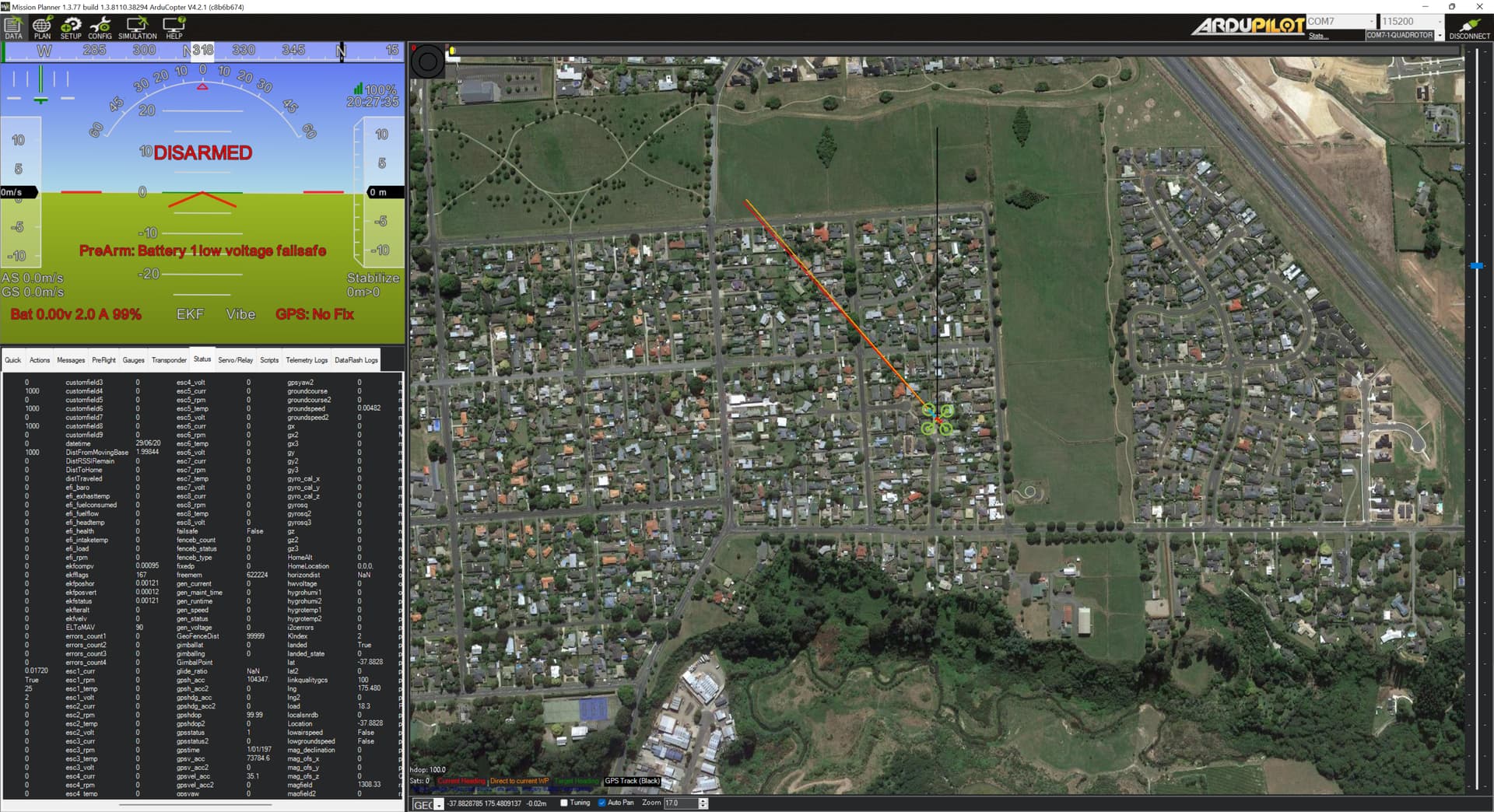
It seems the GPS is detected as I am getting “No Fix” on the OSD and not “No GPS”?
I have connected the GPS via the MSP instructions, using tx/rx2 Serial3, the compass is responding but I seem to be getting no activity from the GPS or barometer.
I have confirmed there is connectivity to every pin with a multimeter.
I have confirmed the unit is getting a 3d fix with a blinking blue LED.
The wiring is as follows:
GPS - Flight Controller
SDA - SDA
SCL - SCL
TX - RX2
RX - TX2
GND - GND
5v - 4v5
Ardupilot Configuration so far:
MSP
SERIALx_PROTOCOL = 32 (MSP) where x is the SERIAL port used for connection on autopilot
I have been trawling the discource for a number of hours and set baud rates and other different parameters for gps protocol types etc but have had no luck.
These are some of the things I have tried
GPS_DRV_OPTIONS = 4 as suggested by another post
Also tried: SERIAL_BAUD = 9600, 57600, 115200
Where can I go from here? What are they key things to check being new to Ardupilot.
Not sure about MSP but if the GPS is connected to the Flight Controller and you are using the primary barometer then:
GPS_TYPE=2 (for that GPS module)
BARO_PROBE_EXT=0 (default)
BARO_PRIMARY=0 (default)
I just connected the GPS to the u-center software and it is picking up sats, I changed the update rate to 10hz and the baud rate to 5700 as a test - no change.
EDIT:
After a bit of tinkering and making the changes above I changed the SERIAL3_PROTOCOL to 5 - GPS.
Well yea the serial protocol needs to be GPS. Don’t bother with Ucenter. The settings will be overwritten by Arducopter on boot. Use Mission Planner to confirm GPS and Baro are working and the troubleshoot the MSP/OSD issue seperaty.
I forgot to add the other thing I changed was the Output protocol from “UBX+NMEA” to just “UBX” in the u-center software.
I also changed the GPS settings back to defaults and it stopped working again in Ardupilot, even with the new settings advised in this discussion and the recommended from the documentation, so it definitely seems these setting were the issue.
Do you recommend I change the baud, update rate and output protocols back?
MSP aside, the default settings work for sure. I have 2 of those same combinations (Slim and Mini version of the H743) and the Matek GPS module. And another of the same Matek GPS module with a Kakute FC.
You are absolutely right, it should work with default settings but it doesn’t… only the changes above allowed it to function correctly for me.
At first I thought it was a faulty GPS unit as I was confident after reading through the documentation, checking my wiring and double checking with you guys here that I had things correct but after connecting to u-center finding it was working perfectly there…
Would it be worth dumping my config in case there is something funky going on with some other parameter? The only parameters I have changed though are the ones above, this is a brand new flight controller that has not had any previous config freshly flashed with arducopter.
Attached is a parameter file for a Matek H743-Mini (same as Wing for most things) and the Matek M8Q-5883 Module. Perhaps you will see something. Matek H743-Mini.param (18.0 KB)
Good morning, discovered your issue with Matek GPS not being calibrated or working and I believe I’m having same issue. I did all the parameters that Matek recommended and my GPS doesn’t even show up to allow me to calibrate it. GPS is working great great blinking blue lights I rechecked the wiring and I’m just not sure what to do next. Any help would be great
You need to share some more details: What kind of controller are you connected to? What port are you wired to? Post a parameters file. Double check that TX/RX wires are swapped (TX >> RX and RX >> TX)
Just commenting here for those coming with a similar issue.
Some Matek boards, like the H743 and F405 VTOL, have a unusual UART to pin mapping.
For example TX1 and RX1 are the pins for SERIAL2, and not for SERIAL1 as one could expect. So if you have No GPS with a Matek board, check the “Ardupilot Mapping” tab of the board on their website. Hope this helps.