@Yuri_Rage and @tridge
I thought it would be worth taking a step back and working get a better understanding of the SiK radios before going on troubleshooting the GPS glitches.
I’ll post about this in the hardware section, but I discovered that there are two hardware versions of the RFD900x. I couldn’t find the markings on the radios to tell which hardware version they were - but a kind contributor on facebook sent me this photo that shows where the markings are - in really small letters.

My original radios are Version 1, and my new radios are Version 2. I loaded the latest firmware on all of them, and discovered that Version 1 and Version 2 radios will not connect to each other. I’ve sent a message to RFDesign to see if this can be addressed.
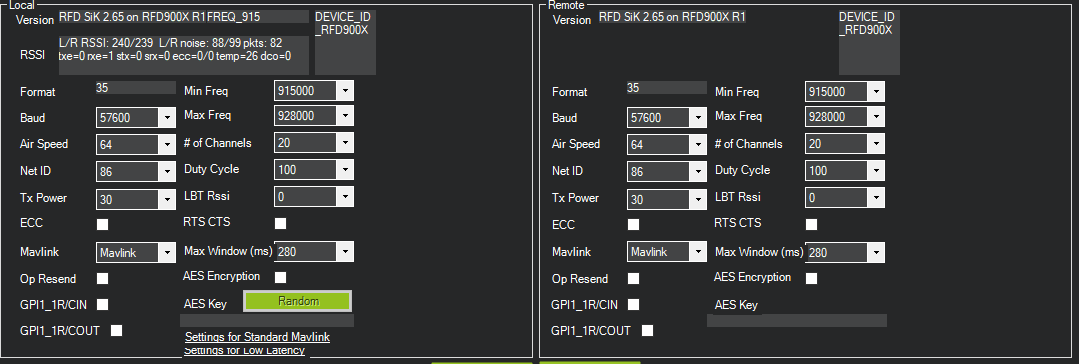
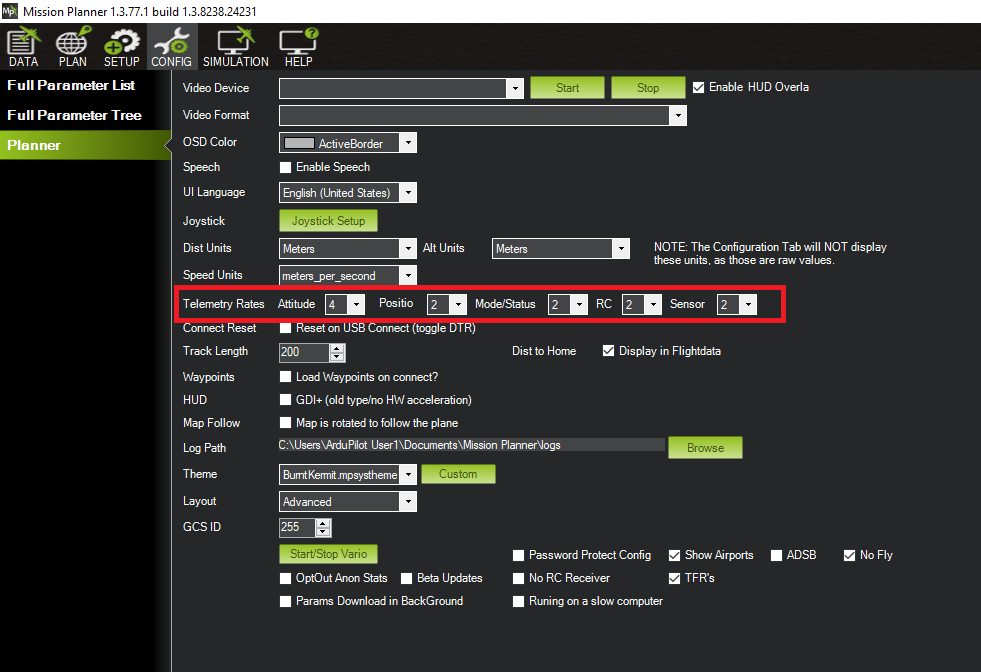
I went back to Version 1 radios on my copters and base. I also set them up with the factory default settings.
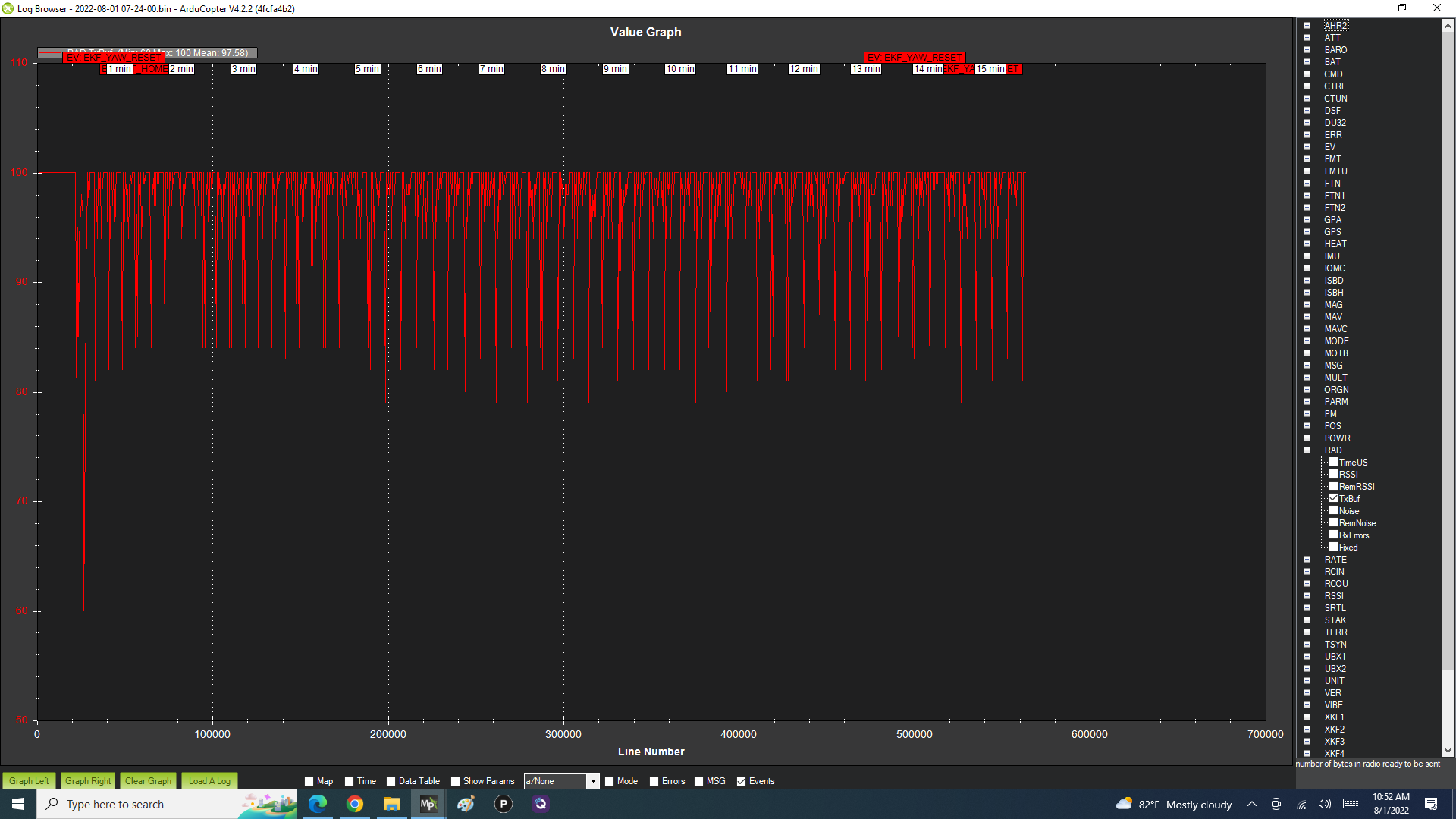
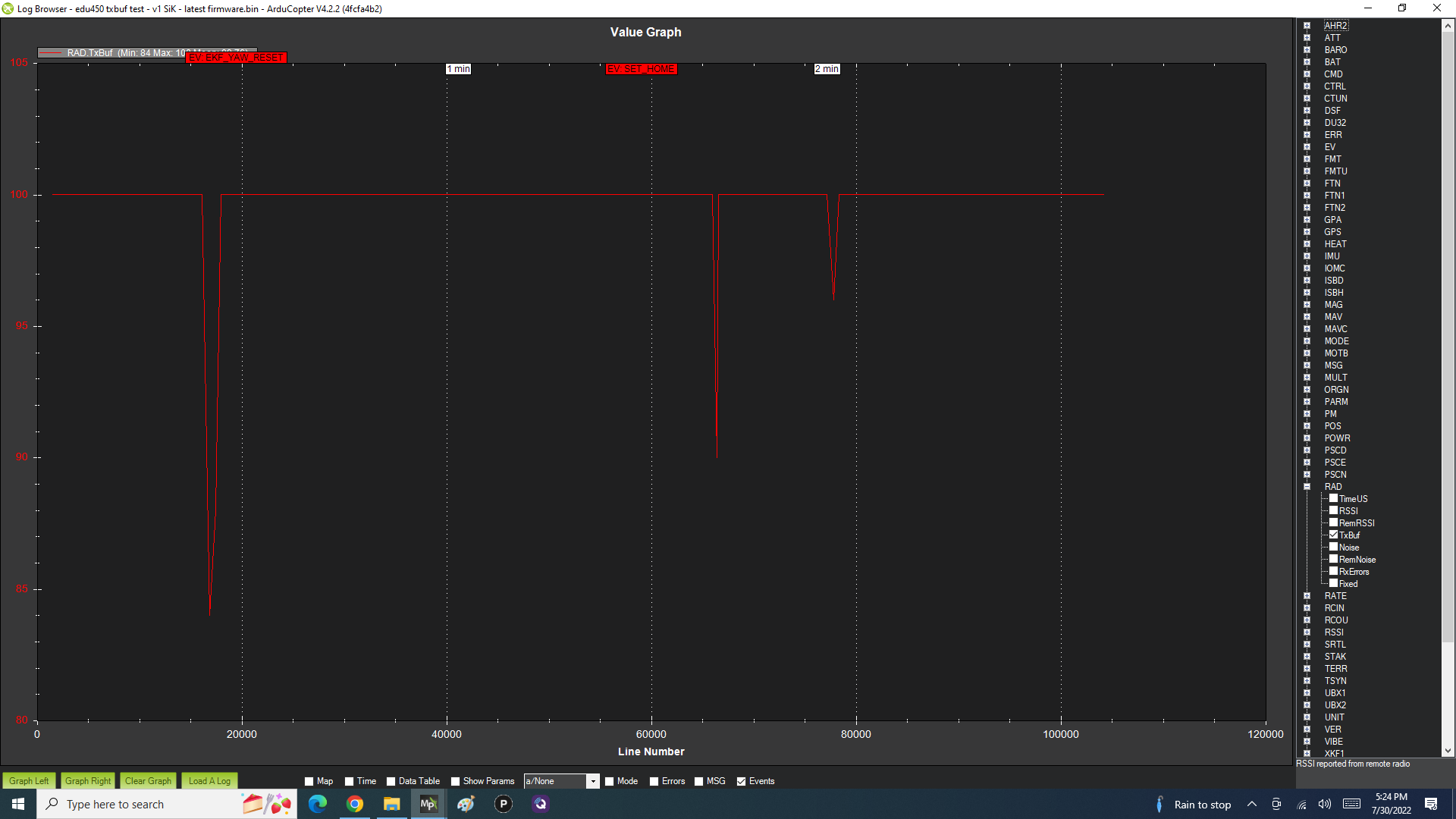
Then without any Ntrip injection, I set up each of my copters, one at a time, to connect to my base for about 5 or 6 minutes. I wanted to get a baseline TxBuf for each. Here’s the result:
My Hexsoon EDU450 - the copter equipped with the F9P and the one that experienced GPS glitches when I started Ntrip injection for RTK. No Ntrip injection on this test.
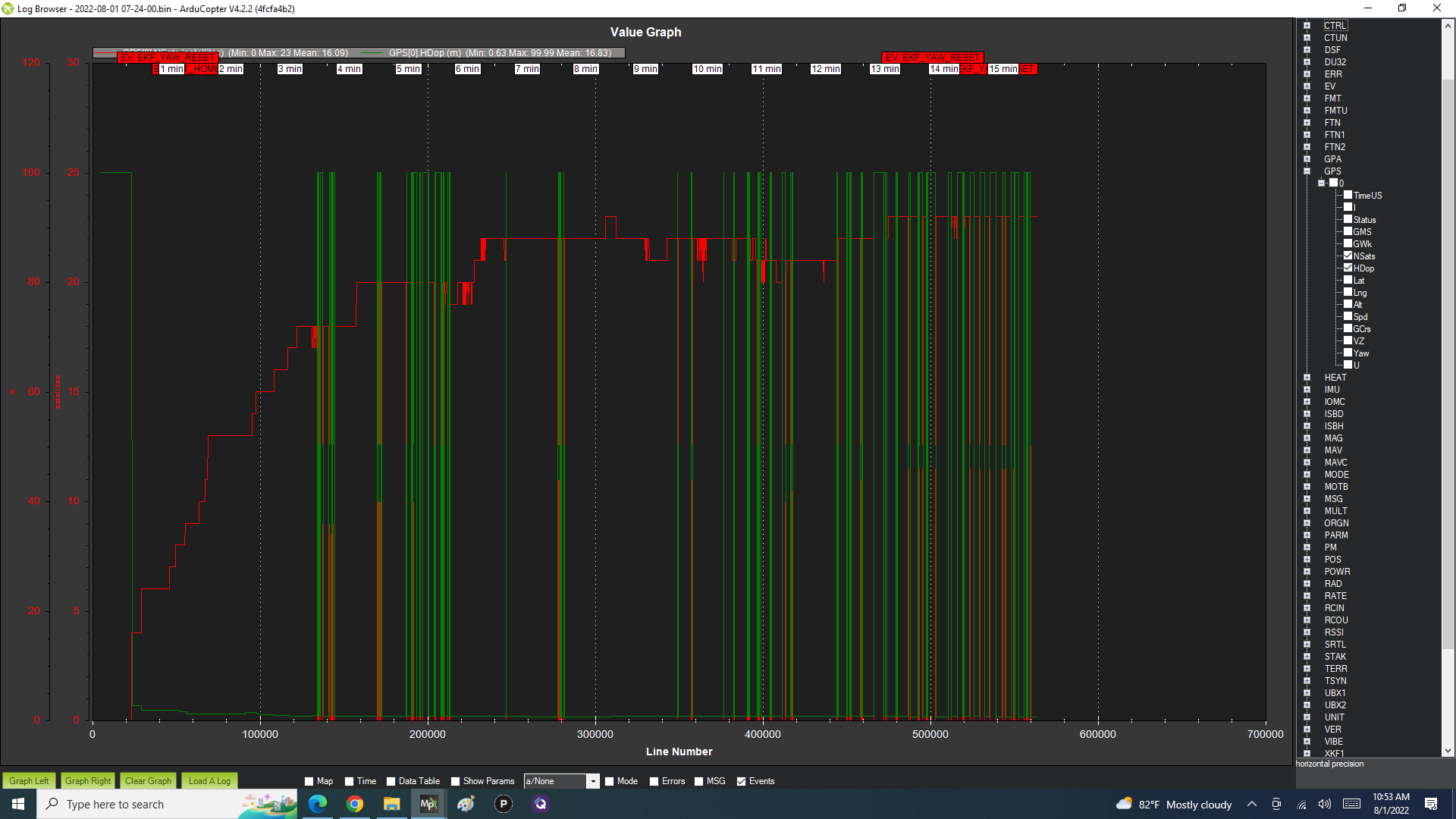
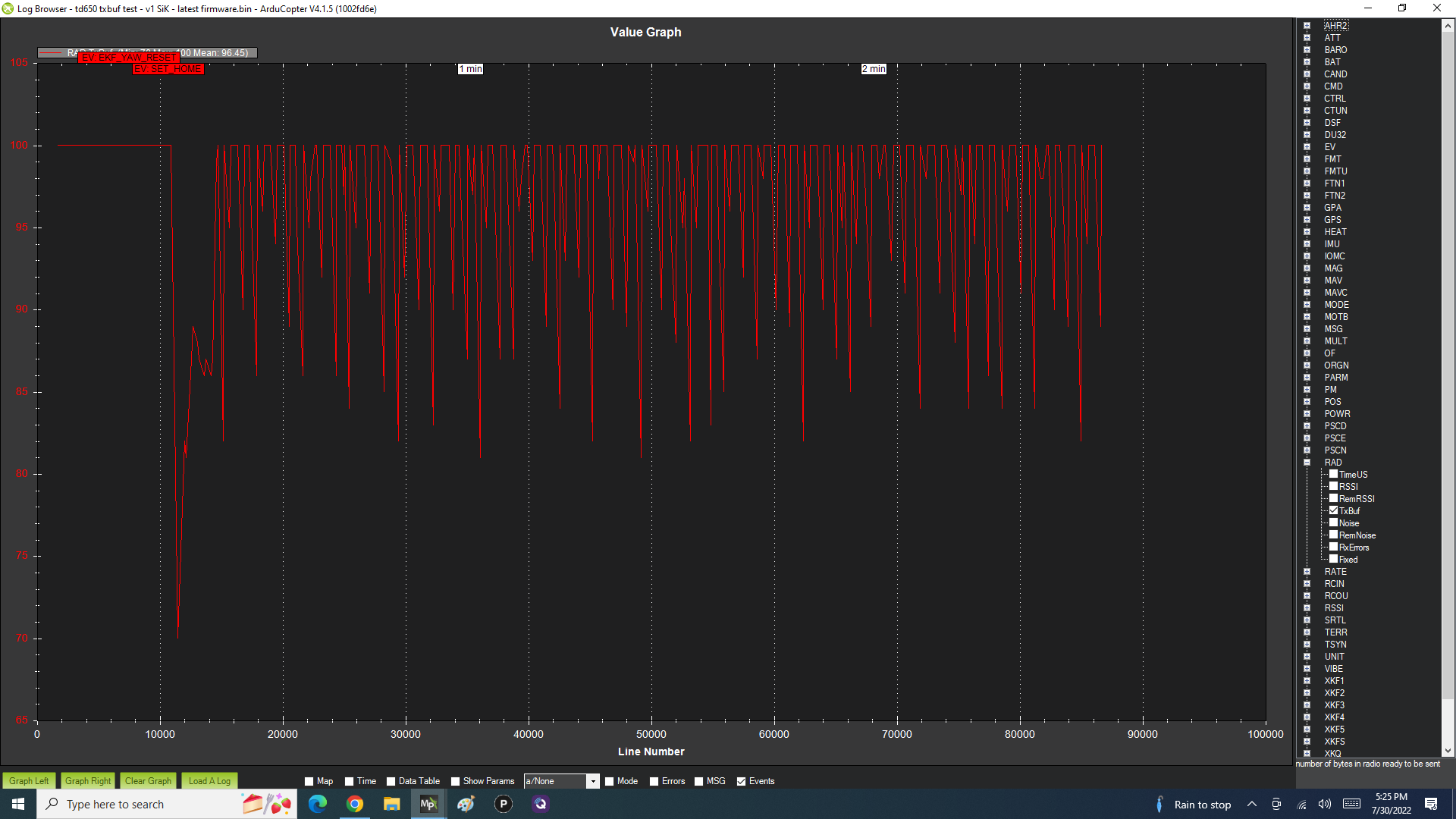
The past logs on my Hexsoon TD650 showed far less TxBuf saturation - and that shows up in this apples to apples comparison - 5 or 6 minutes of connection with default SiK settings.
We’ve discussed ways to set up the radios so they can manage flow control better.
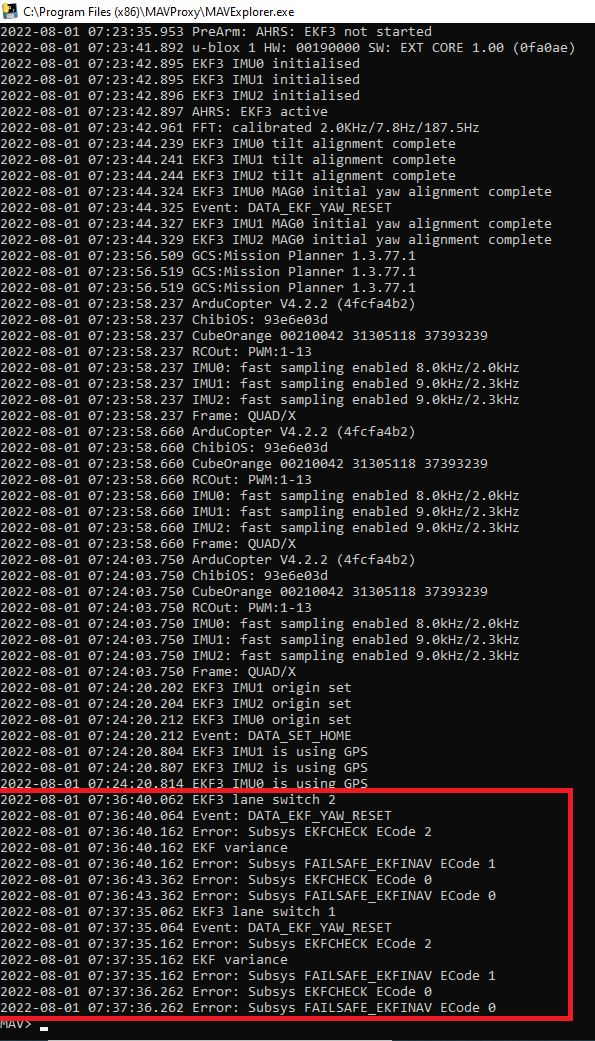
But perhaps the issue is more about why ArduPilot is sending so much data - even when the aircraft is just sitting idle in the workshop. Maybe there’s something in the BIN files of these two test that can uncover this. Both copters have very similar equipment and configurations. But obviously the TD650 has a less saturated TxBuf.
I don’t know if this is the right way to approach the problem. I’d welcome advice on a diagnostic strategy. I’ve uploaded the BIN files for these to sample runs to Dropbox.
Many thanks!