So I just crashed my quad after a VERY short attempt at flying it. I first flew it in stabilize mode to an alt of about 2 meters and then switched it to alt hold. When I tried adjusting its pitch to compensate for wind it banked HARD towards its back right motor and crashed. I suspect this might be due to the back right motor losing power however it flew completely normal until i tried giving it pitch and roll commands
The flight logs seems to also show a loss of power in the motor. But why was it flying normally before the crash? Any ideas on what it could be? The flight log is also attached.
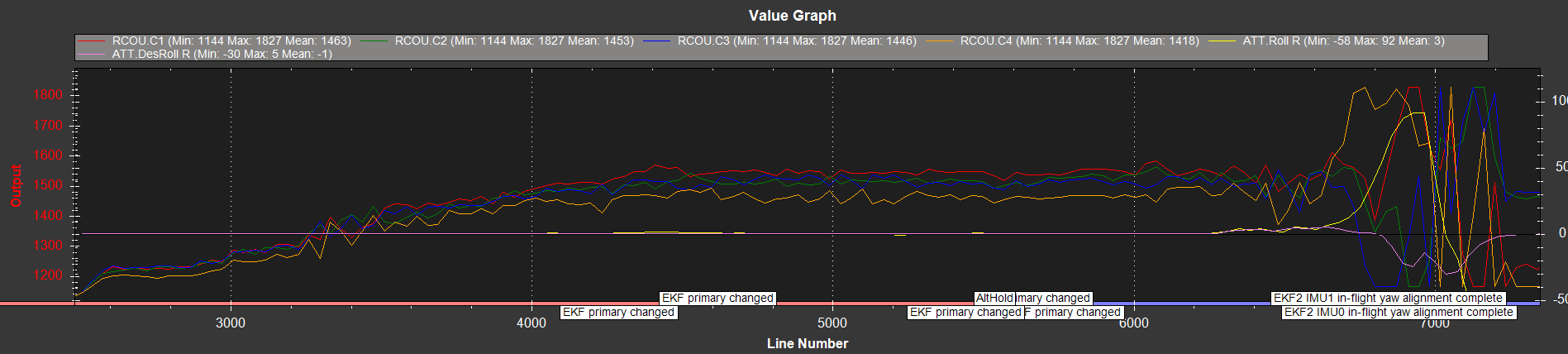
Here, you can see the copter performing an uncommanded roll over: the roll angle (yellow) diverges from the desired roll angle (pink). Just before this happens, you can see the flight controller ask for more effort from the back right motor (motor 4, orange). It seems that motor 4 was unable to respond as expected, so the copter flipped.
A mid flight mechanical failure often takes the form of some screw vibrating loose, a cable vibrating out of its connector, or a bad solder joint breaking free. Triple check all of your connections and fasteners. If they look good, try arming the drone on the ground to make sure all motors spin to make sure none of your components burned out (you can program a motor interlock switch for safety while testing). If it still looks fine, try flying for increasing amounts of time: 5, 10, 20 seconds, etc. After each flight, check the temperatures of your motors and ESC’s. Overheating from too high voltage or spinning props that are too big is another possible cause for a mid-flight motor failure.
There’s another problem I’d like to point out. It didn’t cause your crash, but it would have caused a lot of problems in Alt Hold or other altitude control modes.
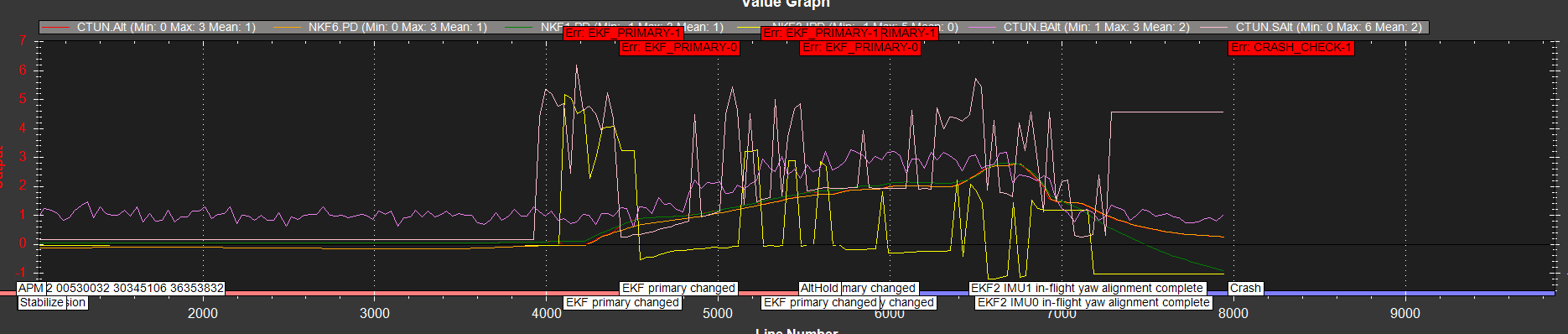
The short version is that your rangefinder reading is very unreliable (sonar?) and it is causing your copter’s altitude estimate to go crazy. Currently you have a a paramter EK2_ALT_SOURCE=1 and EK2_RNG_USE_HGT=70. This tells the flight controller to use your rangefinder as the primary source for altitude when it is lower than 70% of the rangefinder’s max range setting (700 cm in your case, RNGFND_MAX_CM=700). This is dangerous in the case of unreliable rangefinder readings, as the copter will try to maintain altitude using the rangefinder.
You have a few options to deal with this issue. I recommend using the barometer as the primary altitude source; this is the default and is the best option for general use. To do this, set EK2_ALT_SOURCE=0 and EK2_RNG_USE_HGT=-1.
If you need/really want to use the rangefinder as the primary altitude source, you will first need to improve the quality of the readings. I’m not sure what hardware you have, but see if you can improve the readings. You might find that you need to upgrade to a lidar. There’s also some parameters you can play with to give the flight controller an idea of how much noise it should expect from the rangefinder reading: EK2_RNG_M_NSE and EK2_RNG_I_GATE. Documentation on all parameters is here: http://ardupilot.org/copter/docs/parameters.html
Thanks for your detailed response! I’ll check into the loose connector theory, I did calibrate each of the ESC’s individually yesterday and they seemed to perform fine as well. No sync issue or overheating but that was without props. Think I’ll try adding the props upside down and running it at load on the ground for a while to see if it happens again.
Ah now I understand how the alt source EKF setting works , the sonar I’m using worked OK over hard surfaces but this flight was over grass so I’ll disable it for now I think. Unfortunately this drone I’m using is for a uni project so I had to use a sonar to stay within budget. But I’ll see if I can get a lidar rangefinder.
An additional question: could a compass issue have possibly caused this crash? I did have some issues with compass calibration beforehand but I didn’t think it could lead to a crash.
No, a misaligned compass would only come into effect in GPS-enabled flight modes such as Loiter or PosHold. In Stabilize and AltHold, the pitch/roll sticks control a lean angle rather than a direction, so the drone doesn’t really care about the compass in these modes.
A bad compass wouldn’t cause the drone to fall out of the sky in any case. The symptoms of a misaligned compass include flying in the wrong direction and “toilet bowling” - a tendency to fly in circles.
Edit: Oh and I want to clarify that rangefinder readings can still be used for e.g. terrain following or precision landing even when the barometer is the primary altitude source, and that’s generally the best way to fly even with a very good rangefinder.
 2017-10-23 10-55-56.bin (289.8 KB)
2017-10-23 10-55-56.bin (289.8 KB)