About two years ago I tested an Alexmos gimbal I built with a short mission with several ROI points. Even though this was a three axis gimbal, only the pitch was controlled to keep the ROI centered in the camera. The camera’s azimuth was maintained with the copter’s yaw.
Here’s the mission:
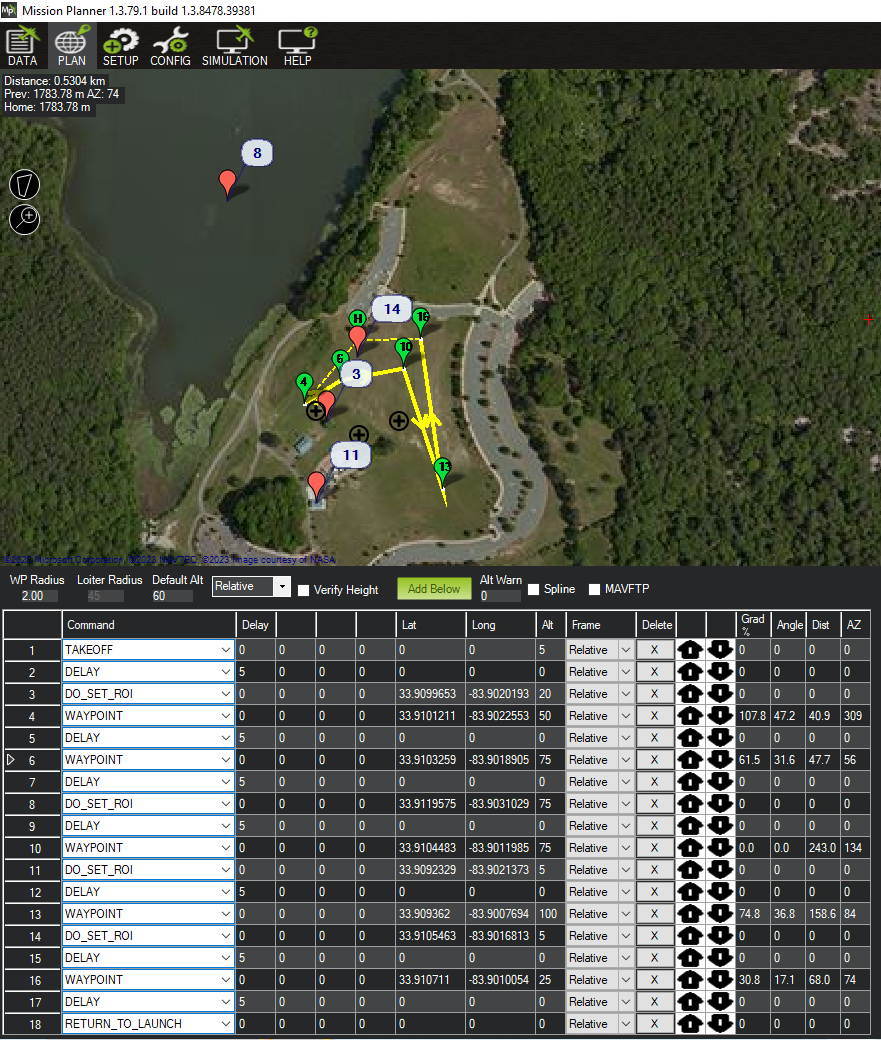
And here’s the video showing that the mission was successful:

I’ve recently installed a SiYI A8 Mini camera/gimbal - and I repeated the same mission to verify that it also worked properly. And I’m now using the new gimbal support in Copter 4.3.
In this new test, the copter did not YAW to maintain camera azimuth.
Instead, the gimbal yaw was commanded to turn the camera toward the ROI - which was, at points, an angle that exceeded the yaw capability of the gimbal. Here’s a video from this mission:

I’m guessing that this is the result of parameter changes - Copter 4.3 has these parameters that did not exist previously.
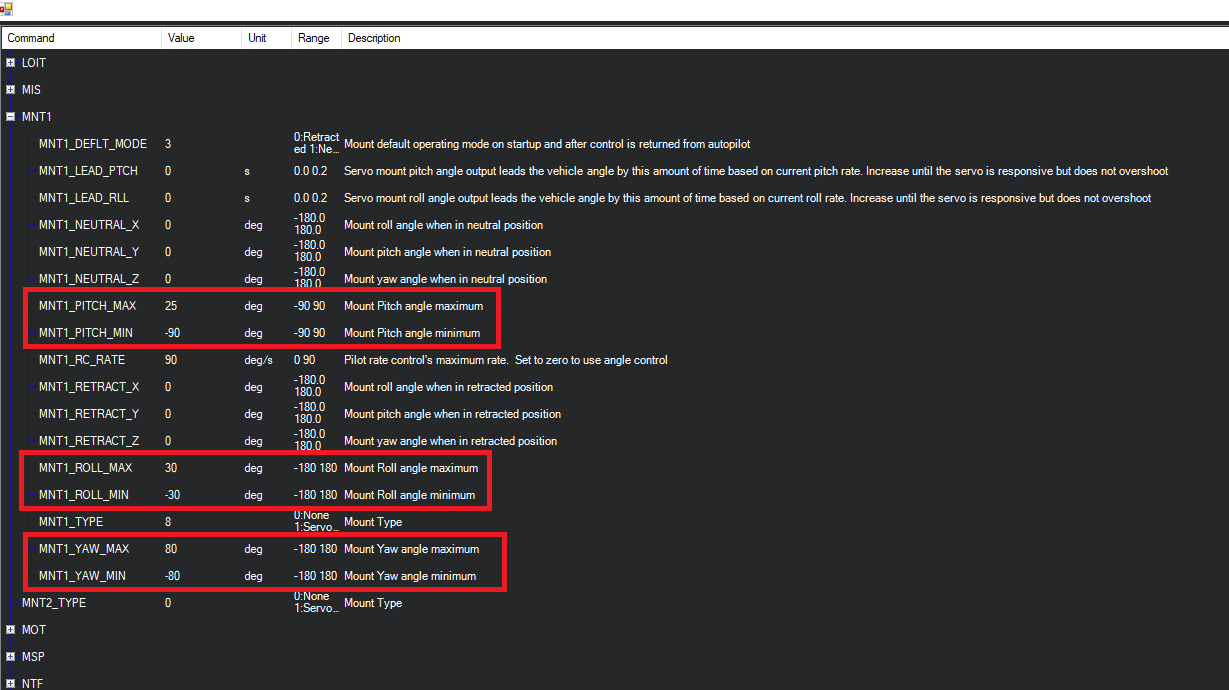
These angle parameters for MNT1 are new with the new gimbal support - and I could not find their counter part in the earlier version of Copter.
My best guess is that if I set MNT1_YAW_MAX=0 and MNT1_YAW_MIN=0 that autopilot won’t yaw the gimbal for the ROI - and yaw the copter as before.
These new parameters aren’t in the ArduPilot parameter list wiki yet.
In case anyone wants to dig in deeper, here are the BIN files from the original and the new ROI mission.
Original ROI test mission:
New ROI test mission using Copter 4.3 and SIYI A8:
Thank you
as info - tagging: @rmackay9