Hello community)
Have a problem with the calibration accelerometers on the CUBE ORANGE PLUS.
The CUBE is not ordinary, even the color is different from the usual ORANGE.
According to the information that was found, it has three identical IMUs and they say that it is better than the previous one. But…
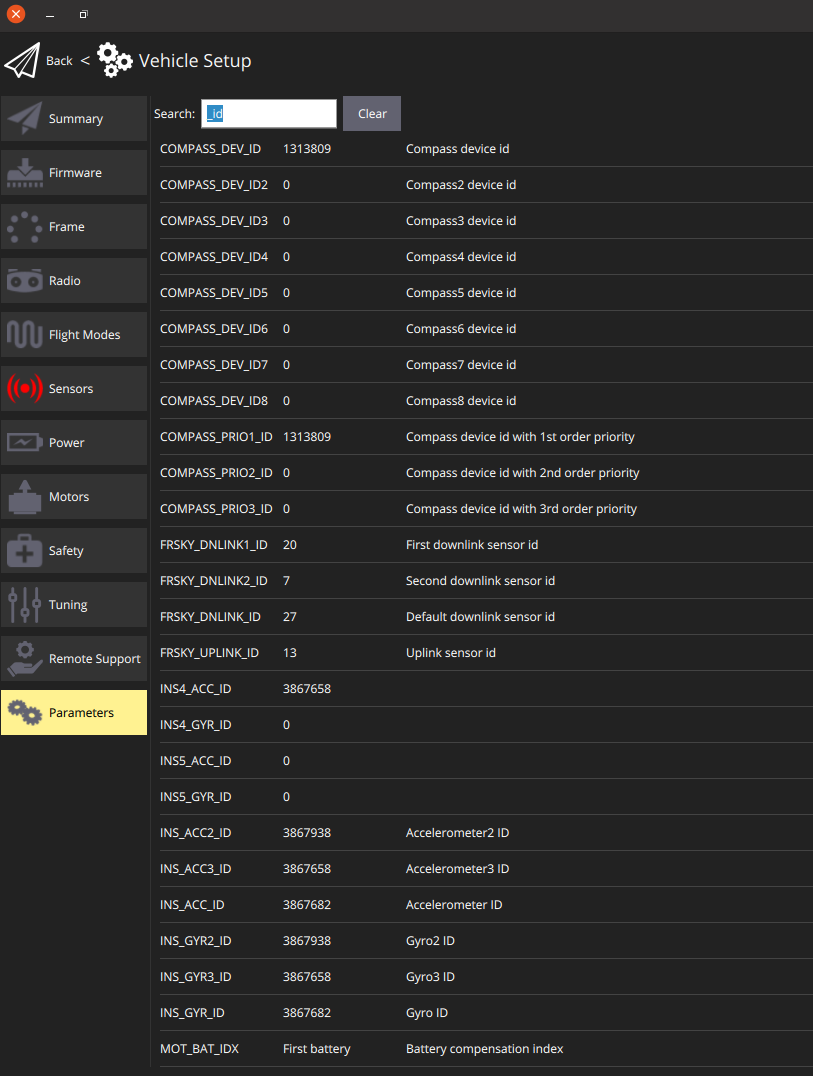
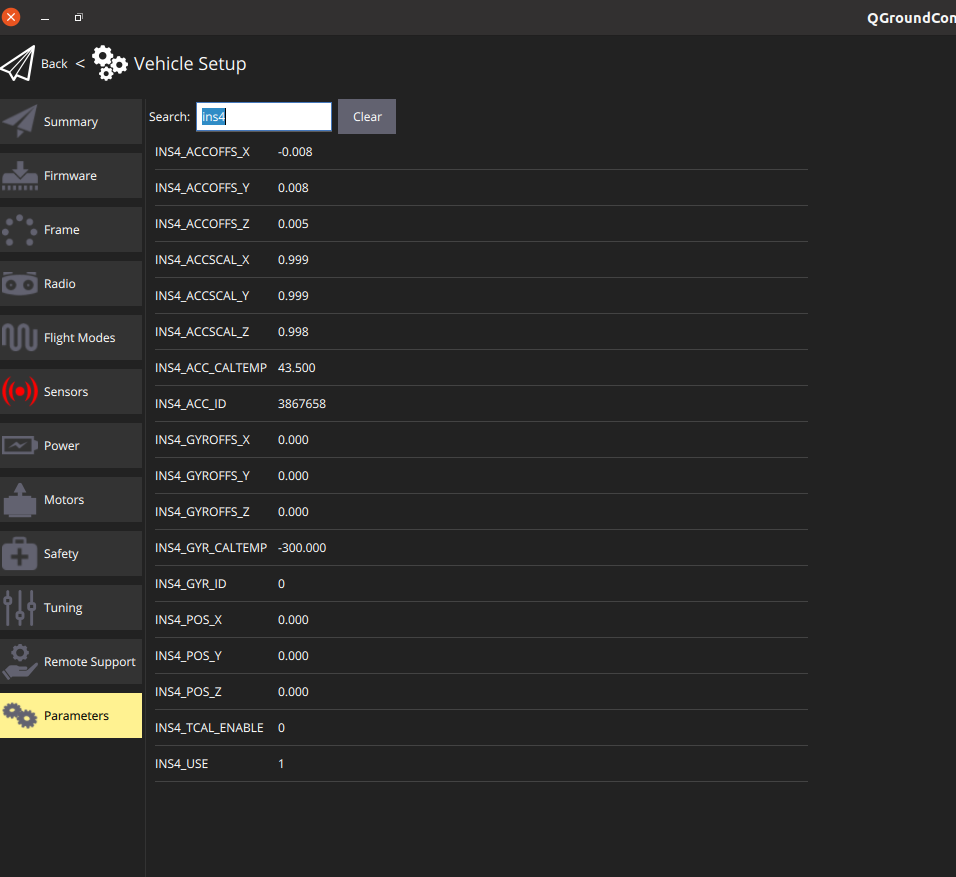
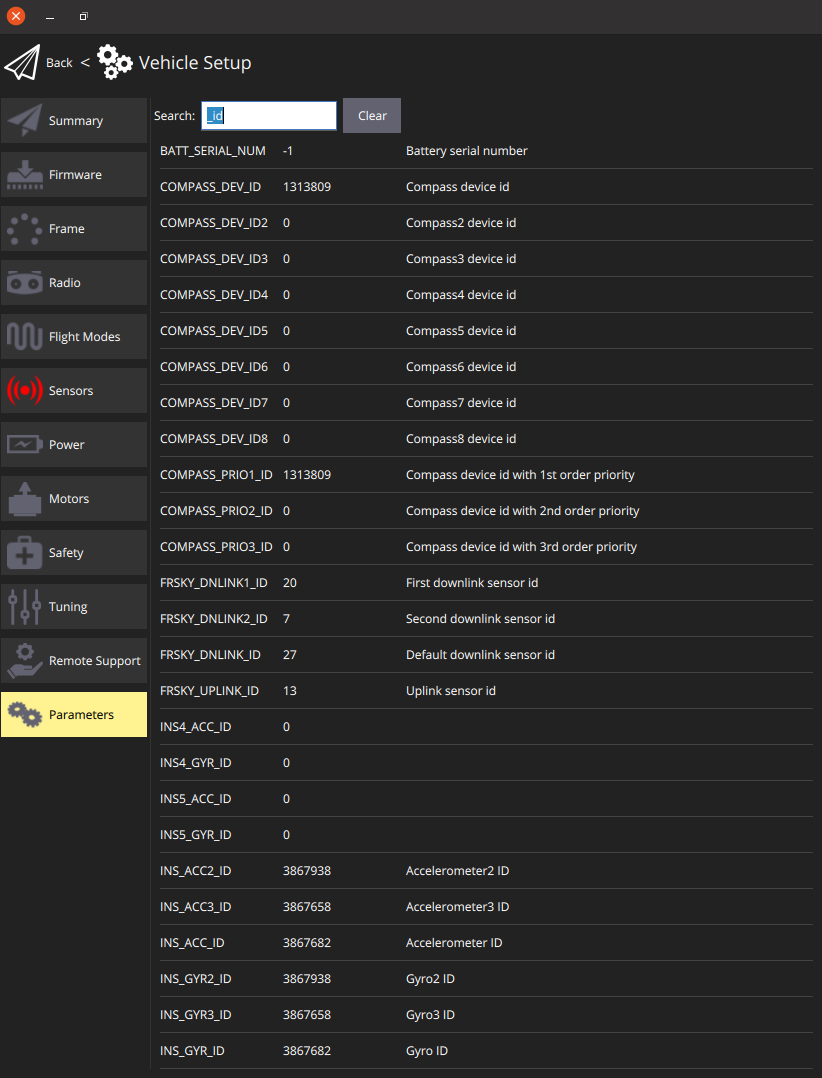
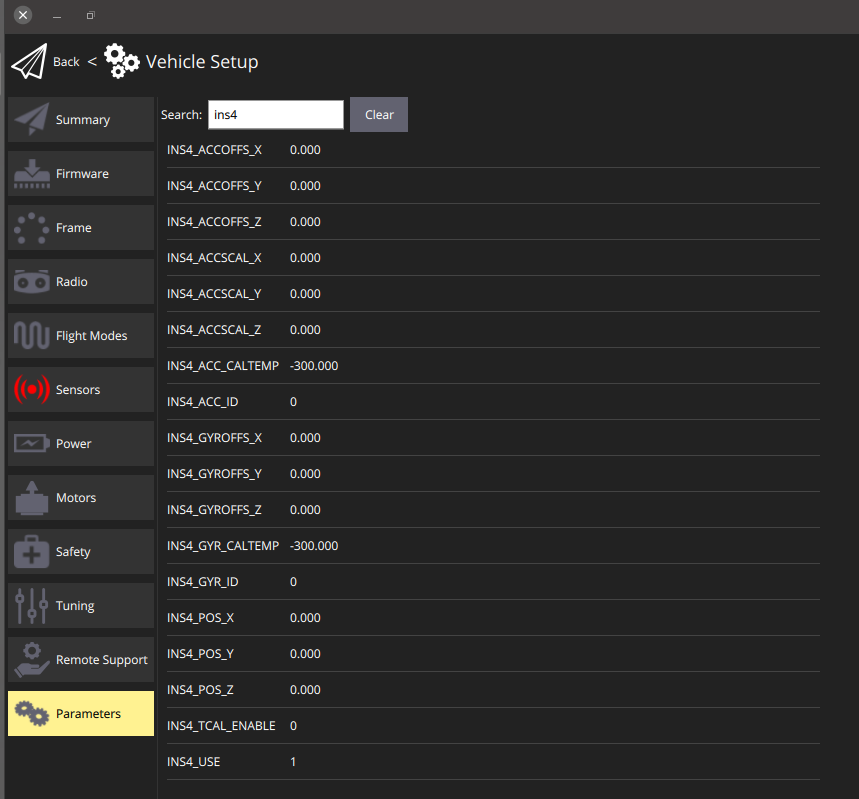
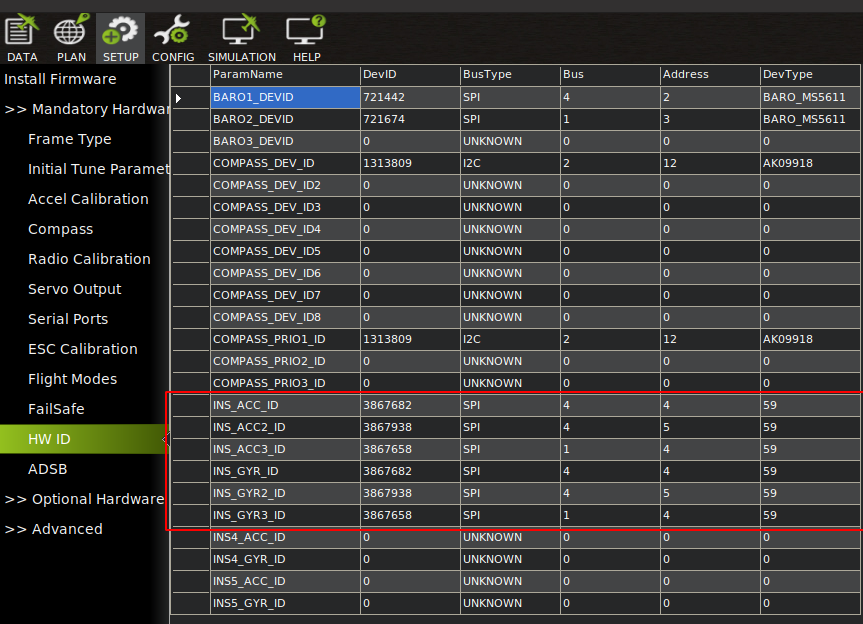
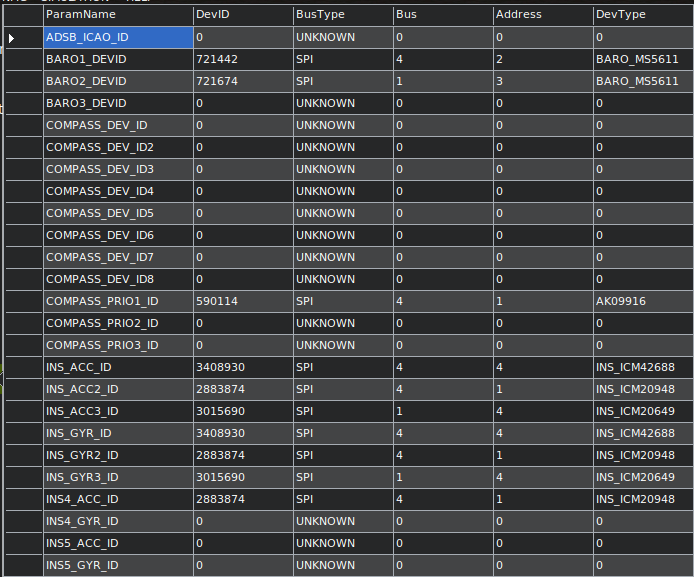
I discovered the problem when, after calibrating the accelerometers and restarting the cube, the pre-arm message asks for 3D calibration needed again. It turned out that during calibration parameters-coefficients for INS4_… are set (by the way, I never understood what these parameters are for). With a successful calibration / recalibration, the coefficients for the INS4_… parameters are missing, in default.
Another problem with this cube is that after calibrating the internal compass (as many times as you like), the pre-arm says Yaw inconsistence …deg. We won’t be using it in flight, of course, but the very fact that it isn’t calibrating suggests that something unexpected is going on.
I would greatly appreciate your help with this. To be honest, everything looks as if this cube update is not fully supported by ARDUPILOT
I did not find any information on the use of such cubes at all. Maybe one of the first.
Maybe something else will be needed from me, I will gladly provide it
It’s just a later rev and the 59 is because you don’t have a late enough version of mission planner. Better to ask this kind of question over on the cubepilot forums
The fact is that neither the mission planner nor the uav log viewer when viewing the log file displays the type of imu sensor. And the question is more related to the calibration of the sensors that I described in detail.
Calibration was performed both through MP and through QGC - the result is not always the same. If the developers of ardupilot confirm that this cube in this version and with such a set of sensors has been tested and fully supported by the software (arducopter 4.4.2 /4.4.4), then probably the question will be to the cubepilot that the sensors do not work as expected. I understand it like this. Or please tell me what I don’t understand.
UPD:
Checked the MP update. I have the latest version. After reinstallation the drivers, result is the same - devtype == 59 for all imu
Thanks for the answer!
I am more concerned about the problem with the unexpected calibration result of the accelerometers and the internal compass. I also ask you to explain why the parameters INS4…, INS5… should be used, each of which mentions the first IMU in the description. I don’t understand this moment(
I too have 2x cube orange 1x Metallic and 1x flat orange. I suspect the flat orange one is older ( though it is from robotshop in late 2023)
The change seems related to ECN 03 but its unfortunate that CUBE Pilot doesn’t have any direct record showing when the in the SN list did the change happen. ( I would have really liked to know that i received an old version at the time of delivery, not 6 months after)
I have the metallic one on my quadcopter. Device ID is 59 for me too however, would knowing exactly what IMU on your CUBE make a difference ?. My quad is fully stabilize in althold mod so it works besides my other problems. Firstly, you could try IMU tempreture calibration and the all other steps for accel calibration.