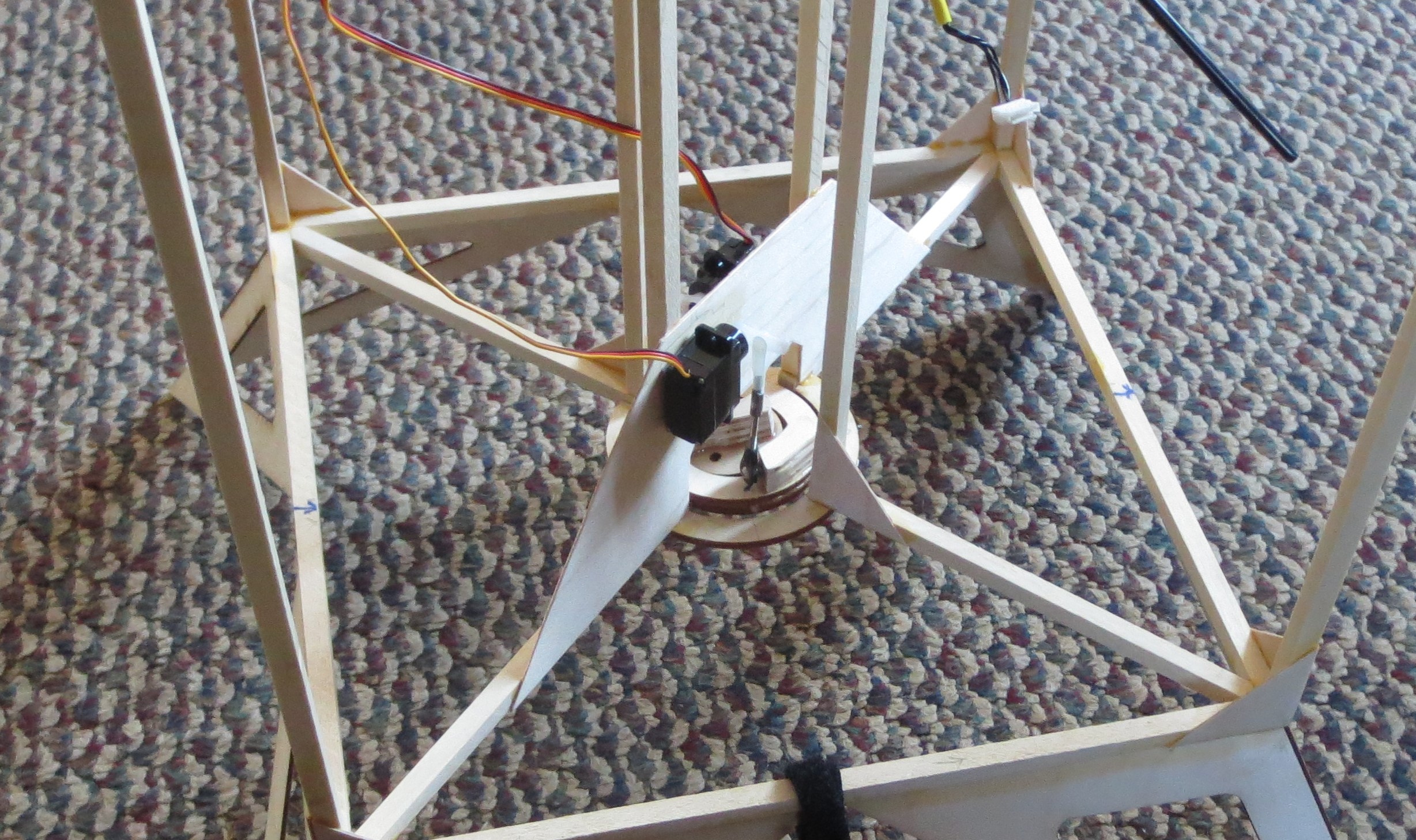
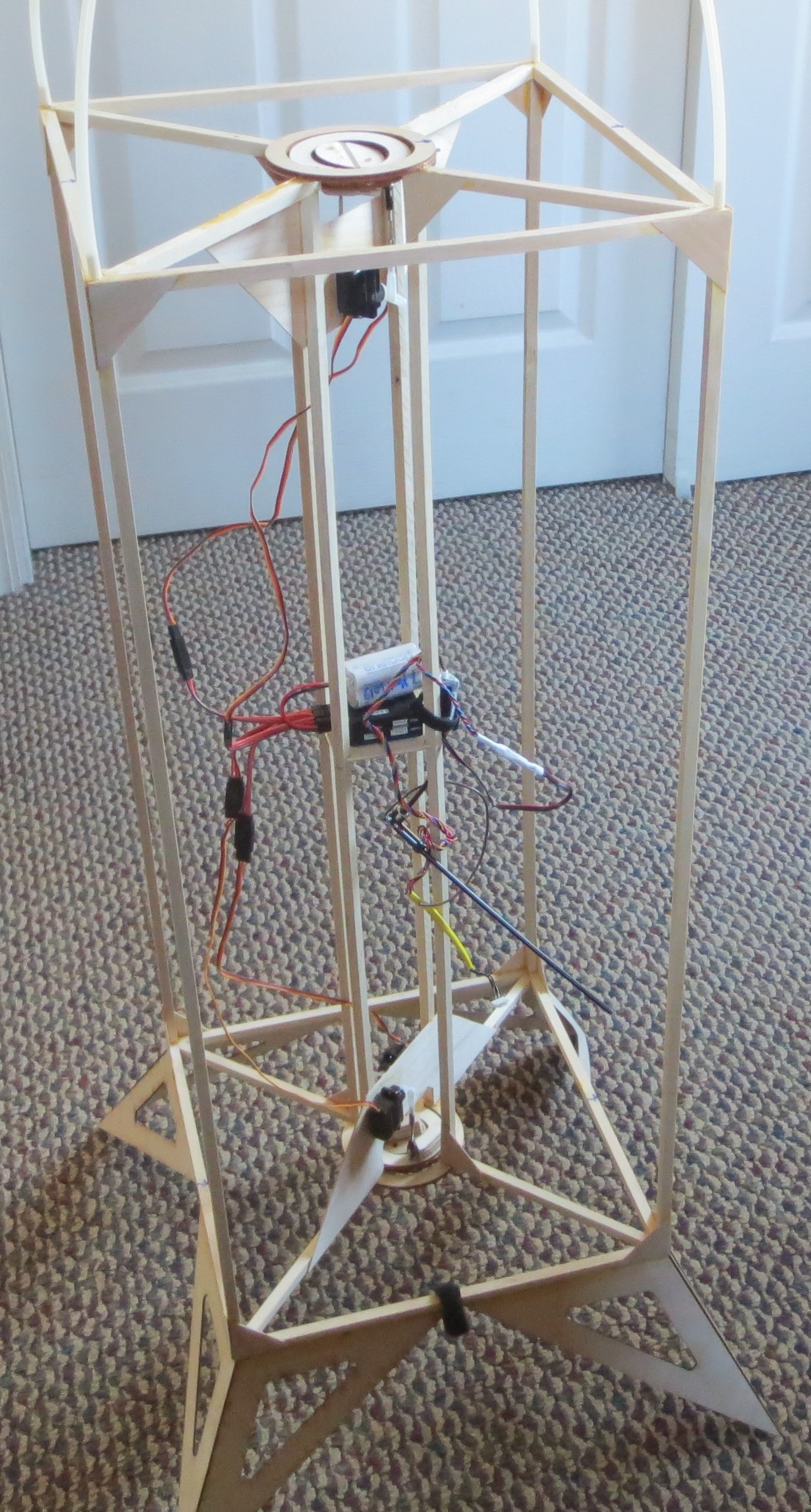
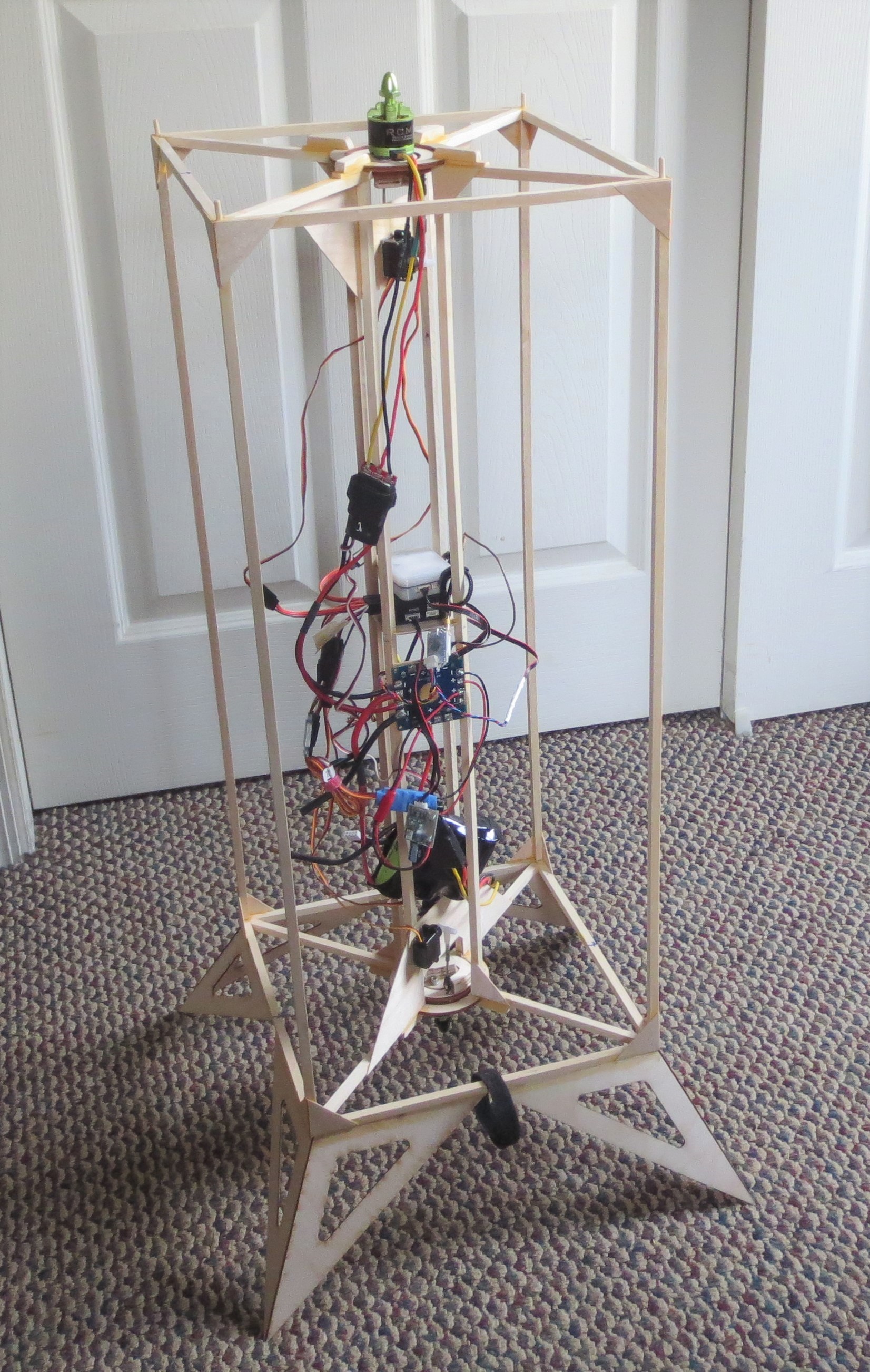
Building a new coaxcopter. My expectation is that this one will have more control authority than my previous singlecopter. It uses two motors, each on its own 2-axis gimbal. The gimbals are controlled by servos that would normally control thrust vectoring fins.
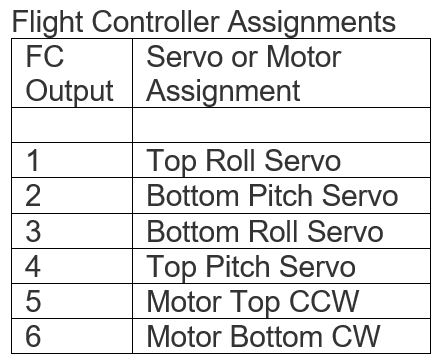
I’m having a problem with the setup. Both the top and bottom gimbals move in the correct directions in accordance with my transmitter stick movements. The bottom gimbal is using servos 1 and 2, the top gimbal is using 3 and 4.
The bottom gimbal makes appropriate corrections when in stabilized modes. The top gimbal’s stabilizing corrections are reversed.
How can I reverse the only the direction of the stabilizing corrections?
First thing is to check that your transmitter stick are acting the right way, check the green bars in Mission Planner move the same way as the sticks except pitch. I suspect if you use servos outputs 1 and 2 again for the top and reverse the servos as necessary it should work.
Had a few test flights. First I hung it on the cord from the ceiling in the basement, powered it up and made sure that the roll, pitch and yaw functions worked correctly.
Then had two short outdoor automated missions. The went well, but at the end of each flight the device tipped over.
Had this same problem with my previous singlecopter. The best way to solve it was to install a large landing gear with a wide stance.
Binned my coax machine because it did not have enough power and the motor gimbals were not stout enough. Something broke every time it landed and tipped over.
I am building a drone similar to your coaxcopter, Great work!
I am having same issue that both the top and bottom gimbals move in correct directions with stick movements, but when stabilizing one of the gimbals is reversed. I tried reversing the motors but it either stabilizes correctly but doesn’t respond to stick movement correctly or vice-versa.
I tried similar servo assignments as you have mentioned and few other servo assignments but doesn’t seem to reverse the direction of just one gimbals with respect to the stick movements.
How can I reverse the direction of only one of the gimbals?