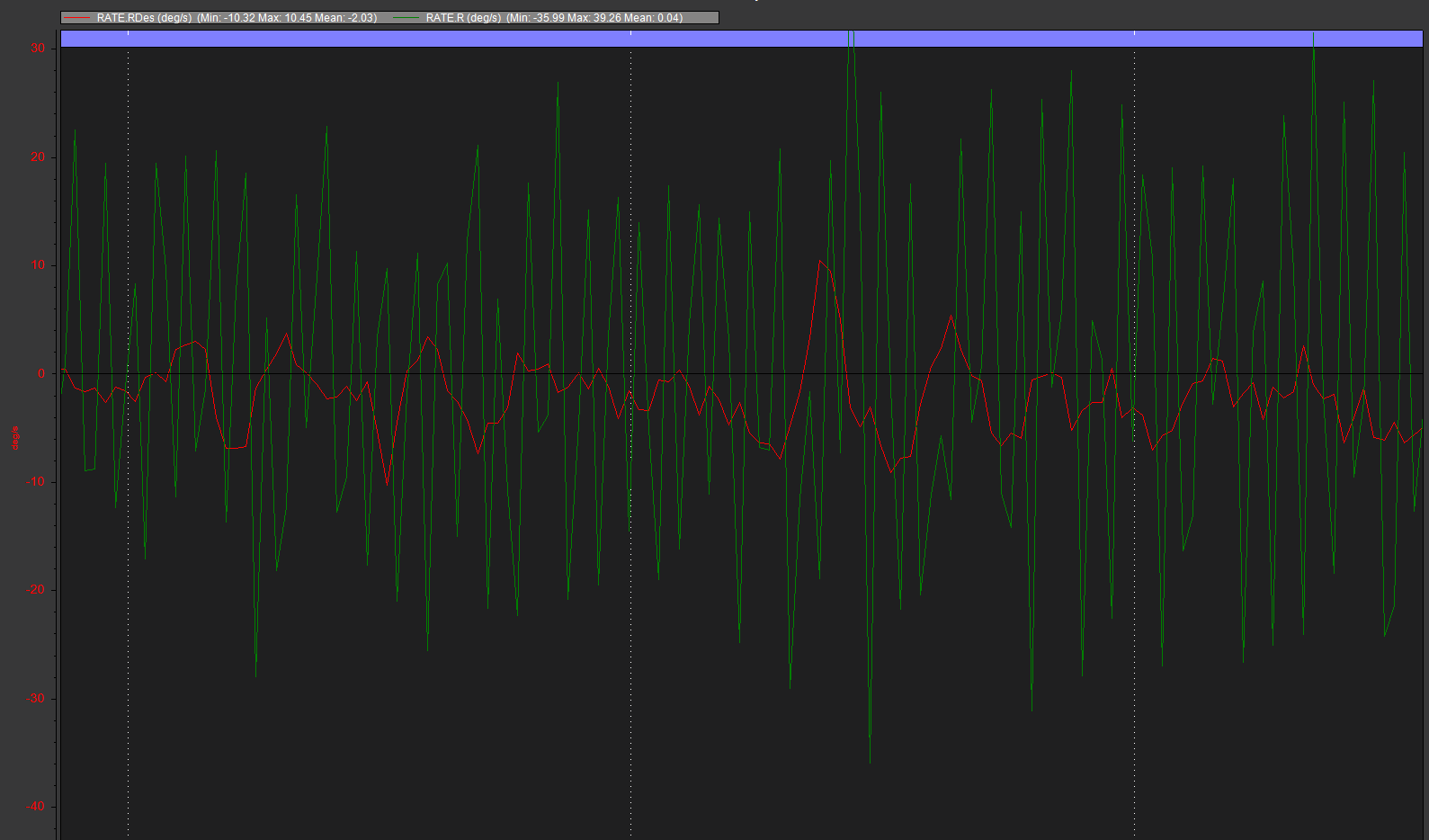
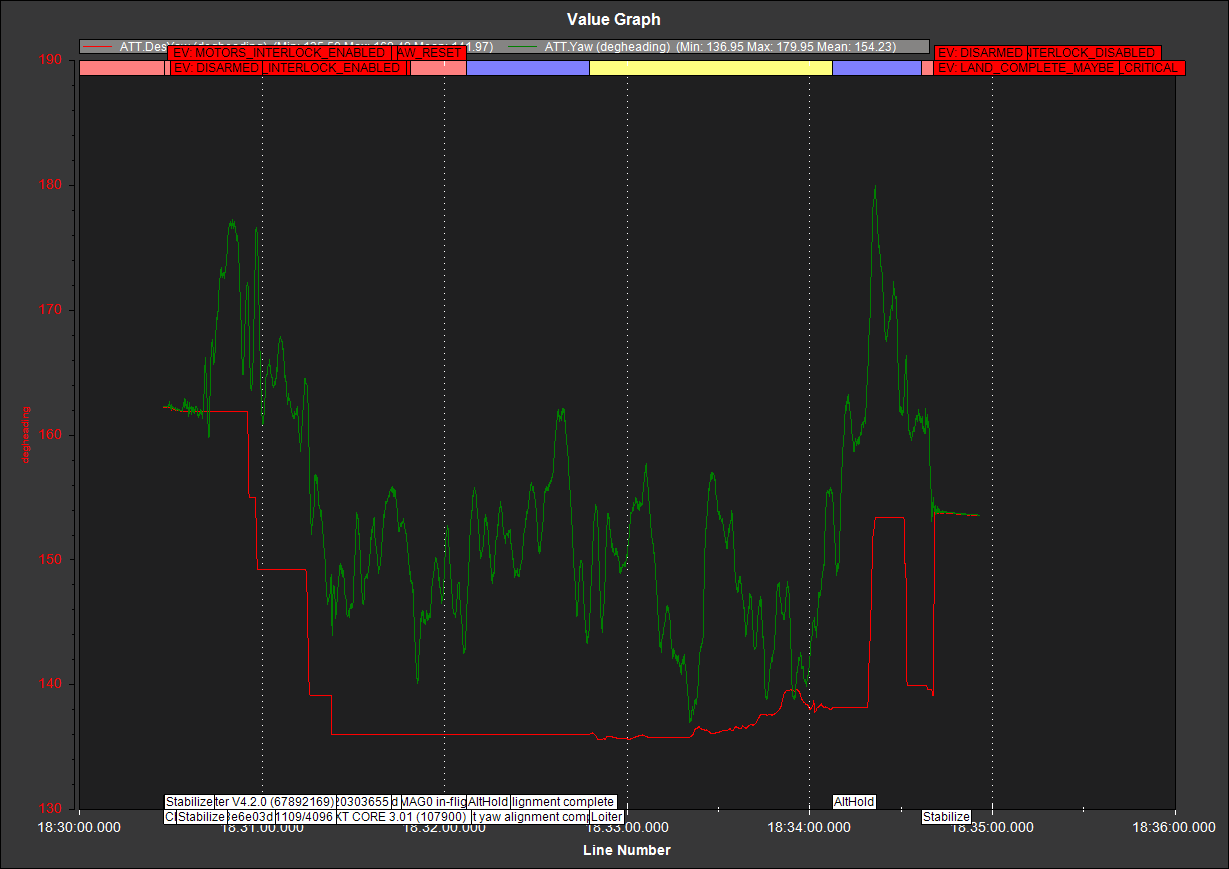
this image indecate that the att.yaw can’t follow th att.desyaw.there is a big deviation.i am not sure this is effect by what .
i am solving these problems,if you have experience on these problems,could please give me some guidance?thanks.
So this is a fixed collective pitch heli with a swashplate that provides cyclic control? The tradheli motors library is not designed to handle a fixed collective pitch heli. You are definitely tricking the software into doing what you want.
It would probably be easier to change your swashplate to an H1 type swashplate. This would not require the heli special swashplate library. Then you could use the Coax copter which is a vehicle type in the multirotor firmware. This uses differential speed for yaw control. Here is the link to the wiki on coax copter https://ardupilot.org/copter/docs/singlecopter-and-coaxcopter.html
There may be a way to have the multirotor code use the swashplate library from tradheli but that would require someone to code it up. I will raise an issue on Github to see if someone would change the code.
@lsy512. So you can make the same collective input to both rotors but you can’t make individual collective inputs the that rotors. That is why you are using differential rotor speed
This is a very unique setup. I am glad you were able to make it work. I suspect the oscillations you are seeing are due to PID tuning. You would have to provide a log for better analysis.