Can you post the firmware you have made for it as well? Can you also share the setup for the swash plate? Are you running three servos?
@hybrid-guy this is about Sprite Vehicule ? have you solved the issue ?
I made a small modification on the software specific to my drone my work is not finished yet , but this in ardupilot dual helicopter frame ( frame class 11) , Sprite Vehicule is not Coaxial Helicopter , it is Coaxial Coper !
@bnsgeyer
I must specify that we have designed a rotor protection, a kind of carbon cap (700 gram), protects the blades in contact with the wall or if the uav flip itself on its side , but add a little inertia in the movement,
for this flight i add the rotor protection ,here was windy weather ,in AltHold it was okay but in Posthold the drone drifts with the wind , is it because the UAV dont have a good stabilized regulation and it disrupts the gps positioning?
https://drive.google.com/file/d/1k4IhoDQPiUhVojMRPmjusTeYc3vUkaiI/view?usp=sharing
this is stationary without rotor protection
https://drive.google.com/file/d/1exR4OZXfr1Pn-2T5_Jq1TL8MTU1vZasF/view?usp=sharing
I discovered that the parameter ATC_HOVR_ROL_TRM was 300 i changed to 0 now
I’m trying to improve PID specially : ATC_RAT_RLL_ILMI ,ATC_RAT_PIT_ILMI , IMAX ,to use integral in Hover ,
For the Yaw imbalance i know we can remove this message but i need to solve this issue , i use external gouvernor i need to add rpm sensor to check speed of the two rotor .
@Tarek-H It doesn’t appear that you set up your collective range for the swash plate using the H_COL_MIN and H_COL_MAX. Also all of your servo trims are still 1500. Is your swashplate mechanical set up perfect that you have completely level swashplates? If not you need to follow the wiki on how to set up the swashplate
Looking at your tuning, it appears that you were able to get 0.11 out of the P gain but you didn’t set up the VFF gains. Any reason why you didn’t set up the VFF gains first. For helicopters they are the most important to set up. These are just my initial impressions looking at the parameter file. I will look at your data today sometime and get back to you.
@bnsgeyer for the swashplate a mechanical adjustment method is used, all servos at 1500 the swashplate is level and the blades are adjusted at an incidence of 5° ,at this angle from the ground he won’t take off, i keep the same mechanical setting used for our software but i know it must be 0° now , i will change it an see .
.
the servos limit is H_COL_MIN and H_COL_MAX ,i kept [1250 -1750 ] is enough, it can not reach the mechanical limit of the swashplates or blade stall angle .
and about VFF gains thank you ,I really haven’t seen it, i need to read well the wiki and set up this parameter.
What is the collective blade pitch at H_COL_MAX and H_COL_MIN? Also be sure that you set the H_COL_MID properly. It should be set to 0 deg blade pitch or the blade pitch that produces zero thrust.
Also please give me access to your log files. It is saying I need permission.
The collective blade pitch min max [-5° 11° ] , i will set H_COL_MID to have 0° blade pitch ,and set the IM_STB_COL_ for Stablize mode .
for the Log files i changed permission ,you should access now
@Tarek-H You will have to provide a log with FAST ATTITUDE and PID checked in the LOG_BITMASK parameter in addition to what already is checked. This will provide more information to access whether you have to use the Harmonic notch to remove noise from the control signals and allow the PID signals to be seen. Please conduct the flight in stabilize mode or Altitude Hold. Make quick 20-30 deg attitude changes in pitch and roll. Then make quick 20-30 deg heading changes. It will help me assess whether you have the FF set properly.
@bnsgeyer I did what you asked , i send you logs ,
I use RAT_PIT/RLL _ILMI = 0.2 ,RAT_PIT/RLL _IMAX = 0.8 , to use the integral and improve the Hover flight .
This flight with RAT_PIT/RLL _VFF = 0.06 , ATC_RAT_YAW_VFF = 0.024 ,in the logs it was clear to me that we need to increase this values .
https://drive.google.com/file/d/1kCUxiM10Lv0TQ-LyffTti7JReDe2Ev2j/view?usp=sharing
2021-08-03 .log.param (17.2 KB)
This flight i changed ATC_RAT_PIT/RLL_VFF= 0.1 and ATC_RAT_YAW_VFF =0.05 to test
https://drive.google.com/file/d/1BnI4hziY1JwgtZ-fke90gSI5p8L4CS_W/view?usp=sharing
There is little delay between the actual rate and the desired rate ,is it normal or it can improve by increasing ATC_ACCEL_x_MAX ?
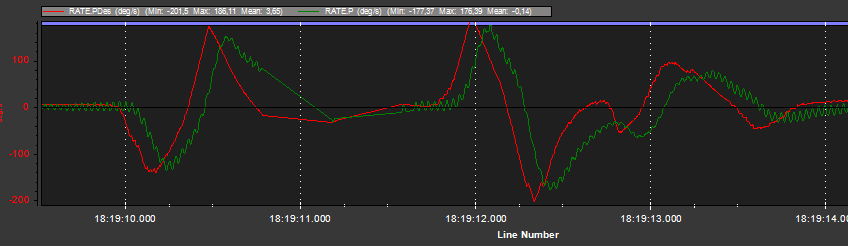
About PID there is a set point overshoot in angle control , i think i need to reduce a little P RATE , and what about ATC ANGLE P ! I kept the default values but there is not a lot informations how tuning it manualy !
@bnsgeyer Hi,i am making a coaxial helicopter as you descripted.but i use the h3-120 swashplate .my coaxial helicopter swashplates ganged and mechanically mixed.they have the same col pitch and cyclic pitch.i use the helicopter frame.i set the below esc as heli-rsc(Fixed speed 50% throttle ,CW) and the upper esc as motor 4 (tail esc ,set h_tail_type 4:DirectDrive FixedPitch CCW). in my real flight,my uav cannot keep its heading ,it rotate quickly,can you give me some advice to solve this problem ,thanks.
co_heli.param (16.3 KB)
So how do you control yaw axis if the collectives are the same on the upper and lower rotor?
why are you using the tail rotor output to control the speed of the upper motor. that should be the same speed as the lower rotor so you could use heli-rsc output for that motor as well. use an ESC that has a governor for both motors
It would help if you included some pictures
It sounds like it uses differential rotor speed for yaw. Tail RSC should work more or less unless there is a proper mode for this.
My suggestion is to have collective and cyclic compensation disabled.
i uses differential rotor speed to control yaw. the lower rotor is control by the throttle curve,the upper rotor is treat as a tail motor.
yes,i uses differential rotor speed to control yaw.could you tell how to have collective and cyclic compensation disabled? is there a parm to close it ,i searched key word in parms,but i can‘t find it .
@bnsgeyer @PittRBM actually,my uav can fly in stabalize mode now .but according to my log the uav state is not very well.here are two image of my log.
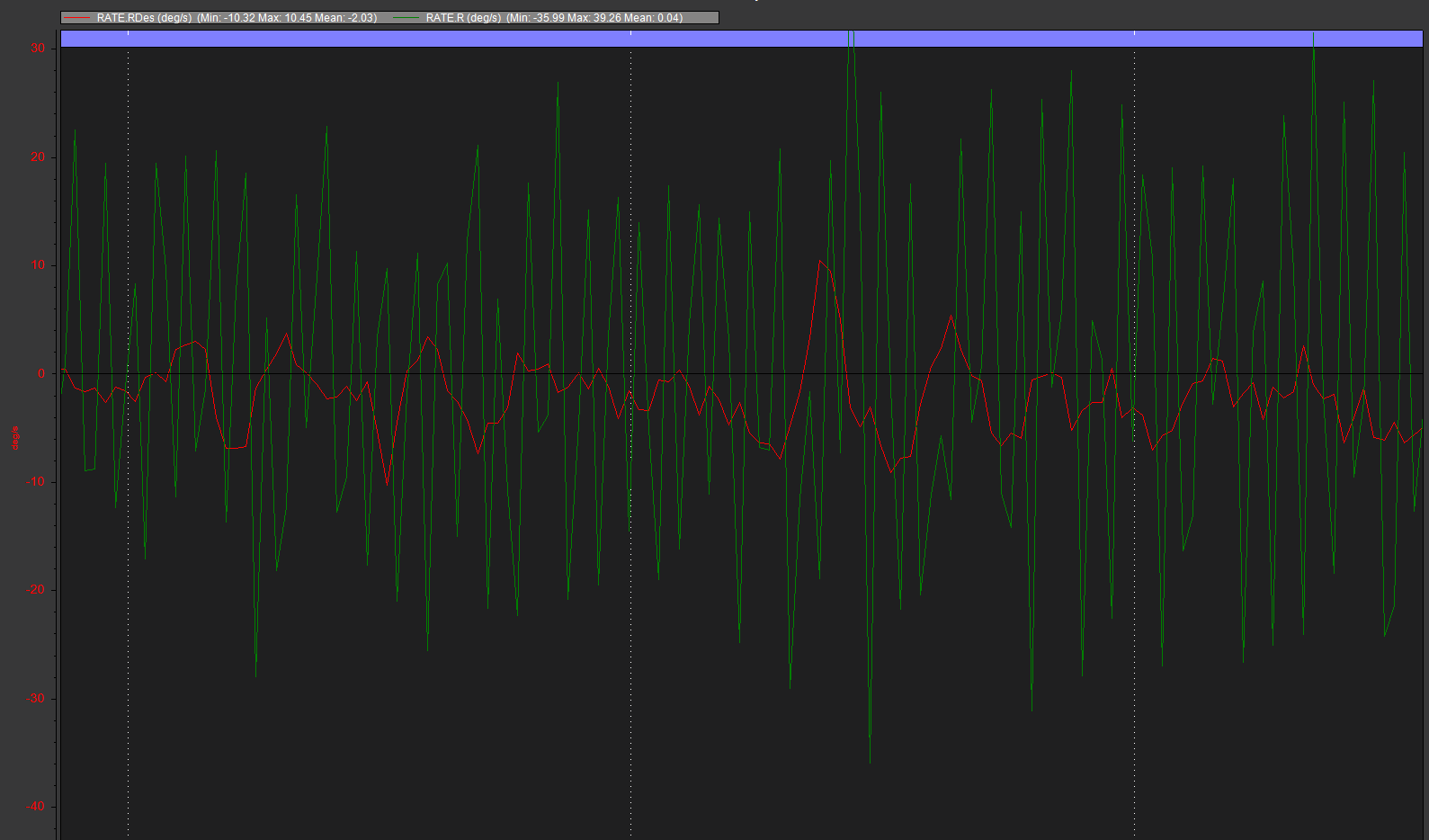
in this image,the rate.R can’t folllow rate.RDEs.i guess it is effect by the vibe of my machine or rotor.but i have allready add shock absorber.
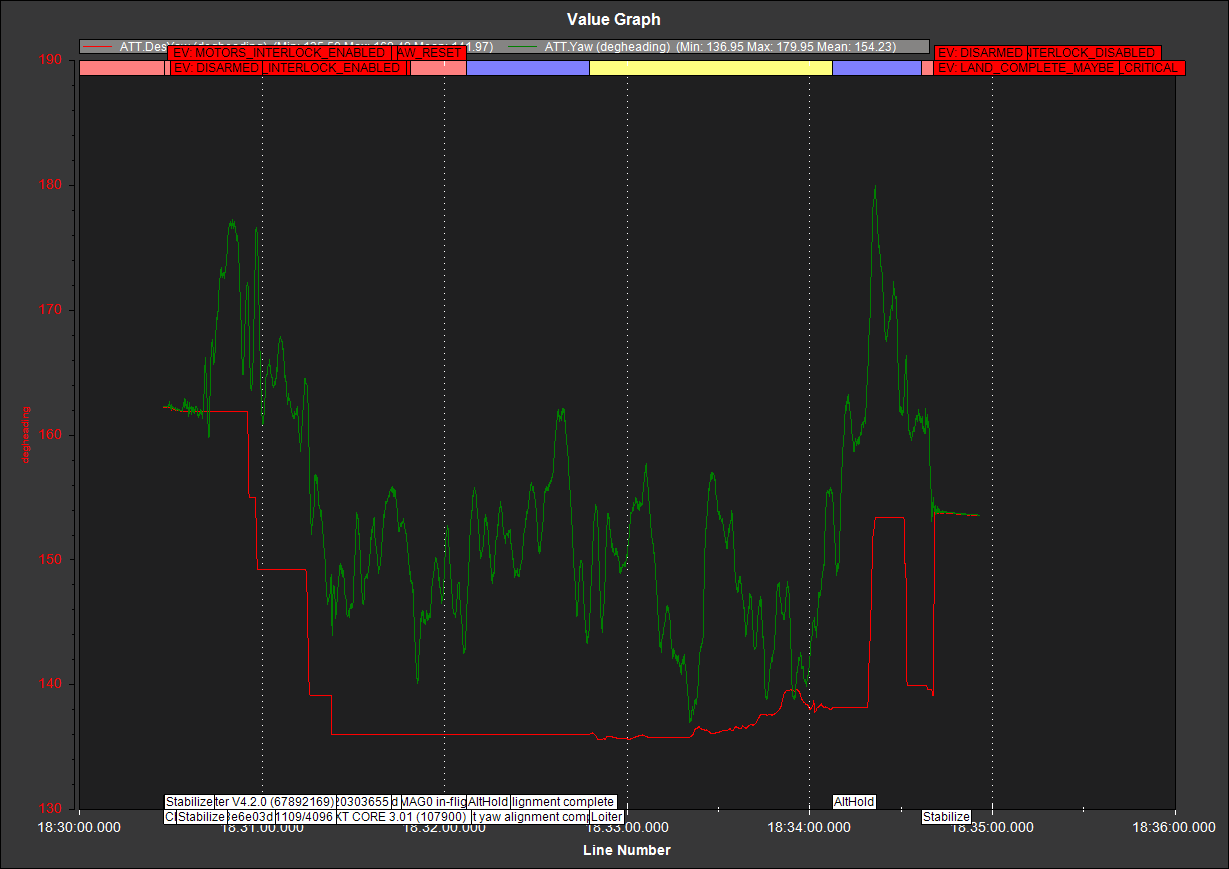
this image indecate that the att.yaw can’t follow th att.desyaw.there is a big deviation.i am not sure this is effect by what .
i am solving these problems,if you have experience on these problems,could please give me some guidance?thanks.
So this is a fixed collective pitch heli with a swashplate that provides cyclic control? The tradheli motors library is not designed to handle a fixed collective pitch heli. You are definitely tricking the software into doing what you want.
It would probably be easier to change your swashplate to an H1 type swashplate. This would not require the heli special swashplate library. Then you could use the Coax copter which is a vehicle type in the multirotor firmware. This uses differential speed for yaw control. Here is the link to the wiki on coax copter
https://ardupilot.org/copter/docs/singlecopter-and-coaxcopter.html
There may be a way to have the multirotor code use the swashplate library from tradheli but that would require someone to code it up. I will raise an issue on Github to see if someone would change the code.
Collective can be changed by throttle.it is a helicopter frame.
@lsy512. So you can make the same collective input to both rotors but you can’t make individual collective inputs the that rotors. That is why you are using differential rotor speed
This is a very unique setup. I am glad you were able to make it work. I suspect the oscillations you are seeing are due to PID tuning. You would have to provide a log for better analysis.
Set the H_COL2YAW parameter to 0.
Also make sure governor is disabled for upper rotor ESC.