I’ve retired my APM 2.0 as it took a hard knock in a crash that destroyed the HobbyKing Go Discover it was in.
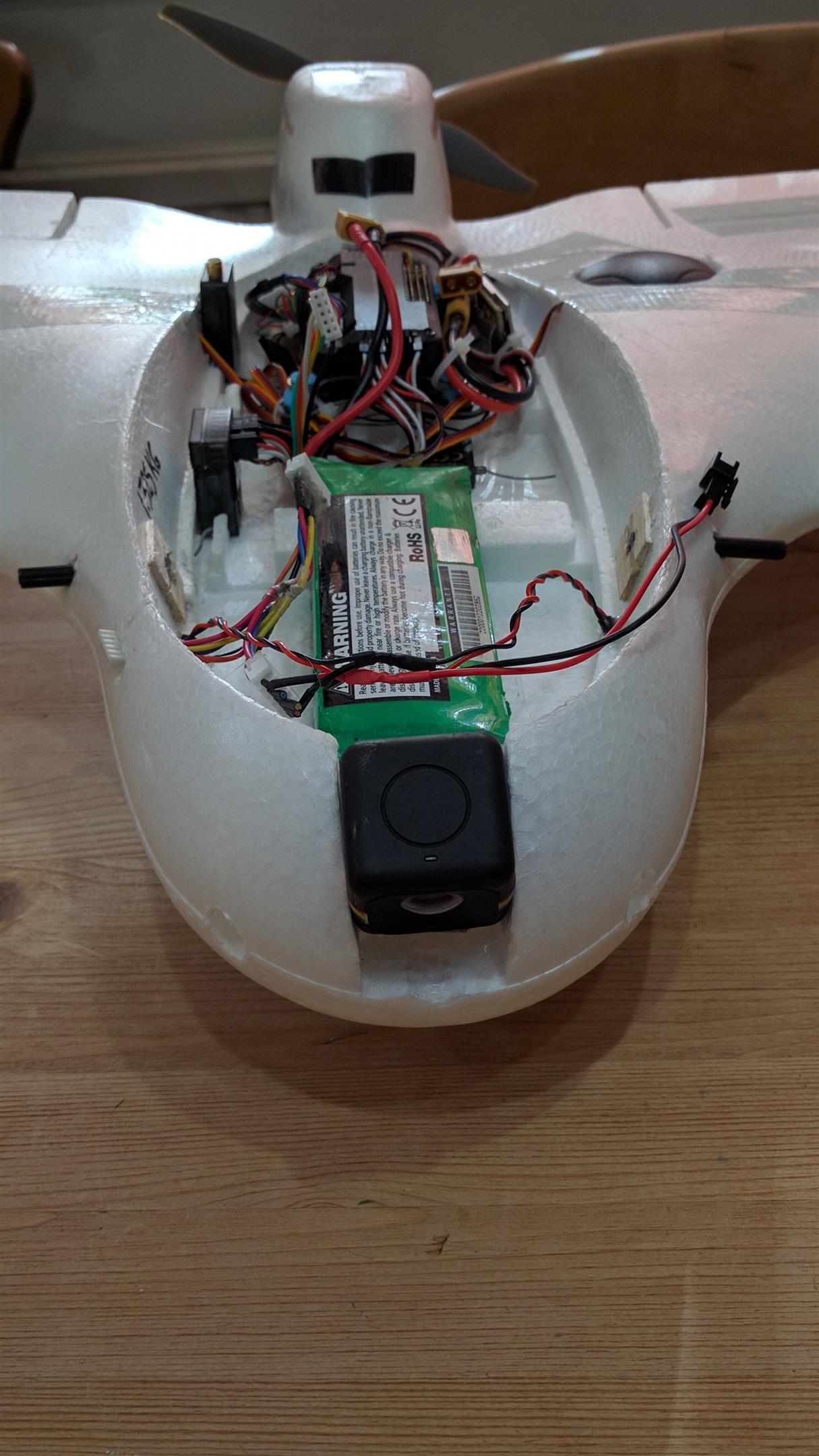
I went for a Skywalker X5 from HobbyKing as the replacement with all new hardware. It’s a bit smaller and easier to get in the car. Maiden flight in 2 days when wind speeds drop. See photos for finished build. Spec is:
Motor - Turnigy D3536/5 1450KV, 655W
8x6 APC electric prop. Open to other prop size suggestions.
ESC Hobbyking 50A
Battery 4 cell 5200
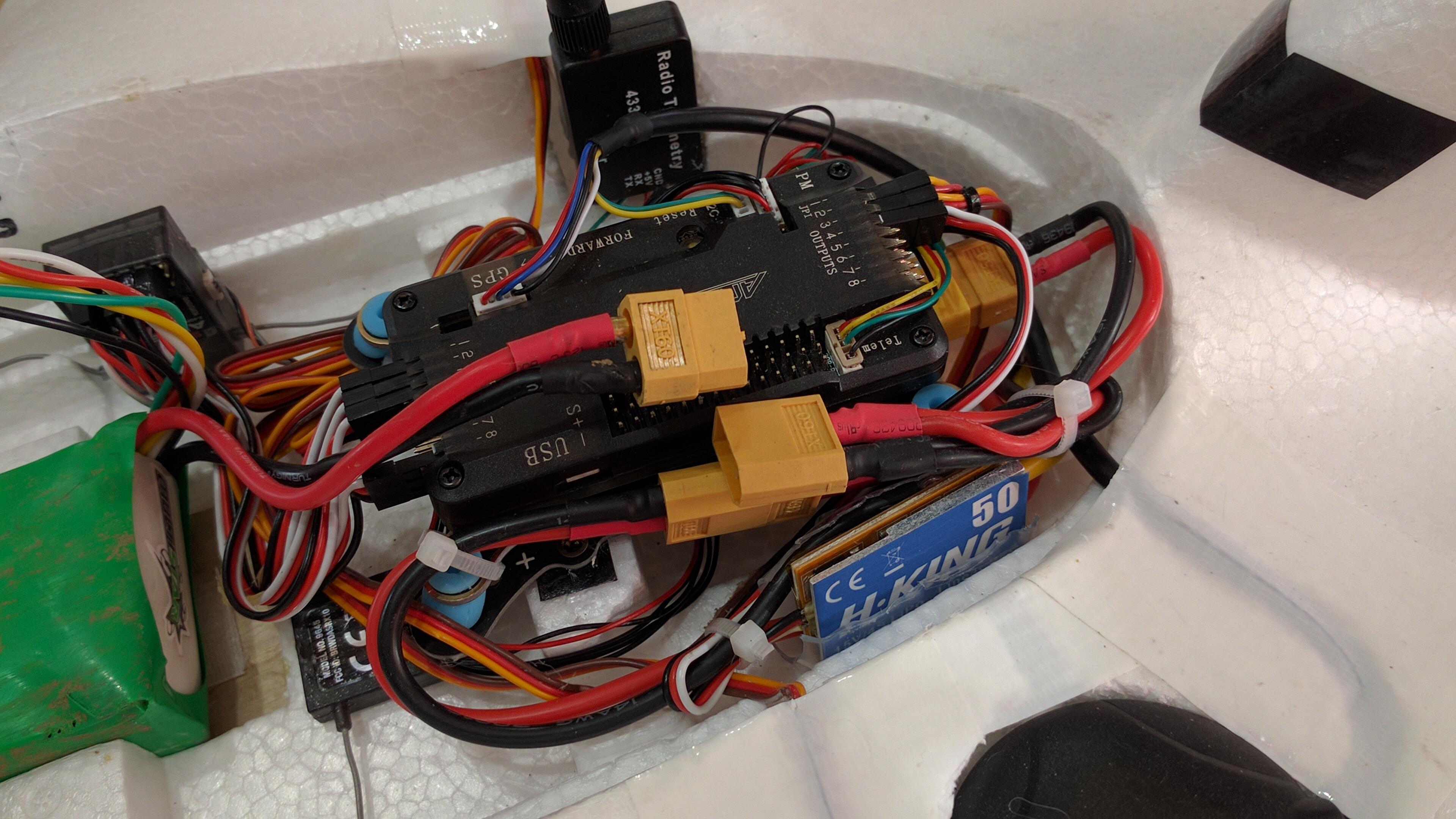
APM 2.6
Ublox NEO-6M High Precision GPS Module (sunk into left wing root)
433mhz 3DR Telemetry Kit
APM damping mount with integrated PDB BEC Module
No air speed sensor - I’ve never had great faith in their accuracy. What I do is set min throttle to 35% and this covers for strong tail winds.
Mods made to the plane are:
Extra laminated balsa tail skid (also help for yaw stabilising) to protect prop on landing. 2 carbon rods fixing it in main body.
Balsa layer on front landing skid
Elevon hinges far too tight. About 60% of the EPO hinges cut away and gaps taped to prevent pressure equalisation
Larger servos fitted. Wing recesses enlarged to fit.
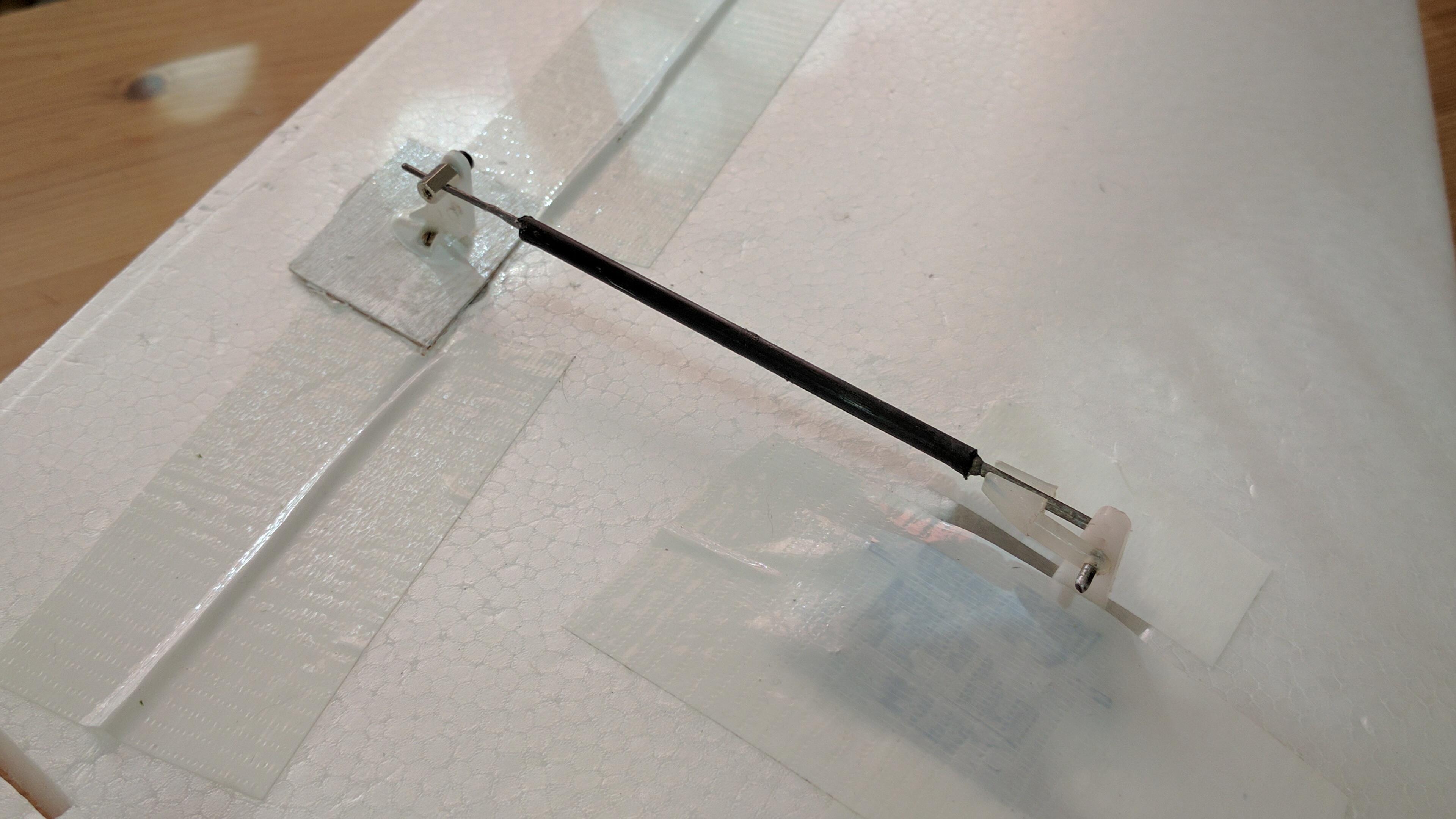
Elevon linkages upgraded. Original horns and rods very flexible and free play in joints with sloppy response
Additional GPS tracker with SIM card powered by lipo mounted in canopy top. I can call in and get position and speed if out of range (or if it never comes back).
Polaroid cube camera in nose. Will upgrade to FPV camera with SD card soon.
Total flying weight 1.33 KG / 2.95 Pounds
Any ideas / suggestions welcome before maiden flight. After I’m happy with the flying I’ll use the Autotune to get it ready for autonomous flights. I’ll be starting from scratch with the parameters for this so if anyone has any tips, they’re more than welcome.