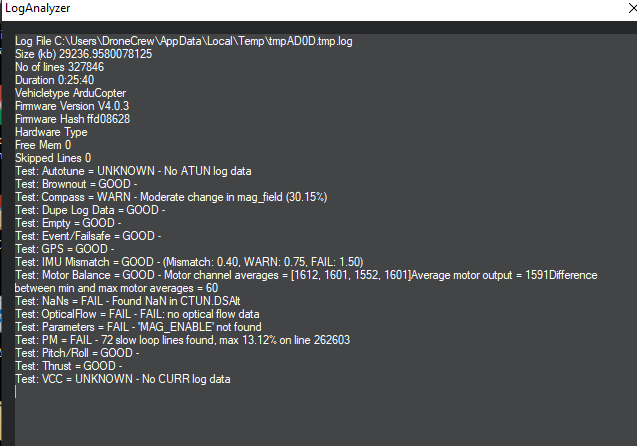
Two weeks ago I put some serious hours on two recently built copters… I am attaching 2 logs for the quad… note it was seriously hot 95 degrees F… but im concerned with mag fields and also the slow loop lines… also kinda confused why one flight shows acceptable mag varience and another shows a warning, same with motor balance… anyhow, if someone would take a look into the logs and giving me advice on how I can improve results I sincerely appreciate it. Link to both logs below: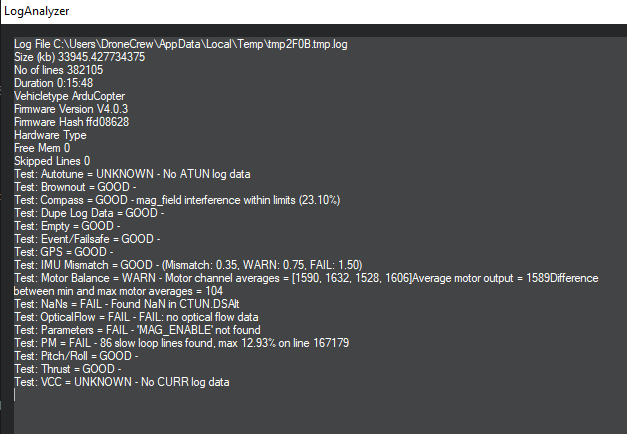
https://1drv.ms/u/s!AmW8JONezY1UgoULLJZ_azbu8byVOw?e=pdD6la
Hi @mbuilds
about slow loop in your logs it’s just a resource hog, which is mitigated by ChibiOS. in fact some loops are took more than 5% longer than the 10ms.
it could because of one of your modules like GPS or something else.
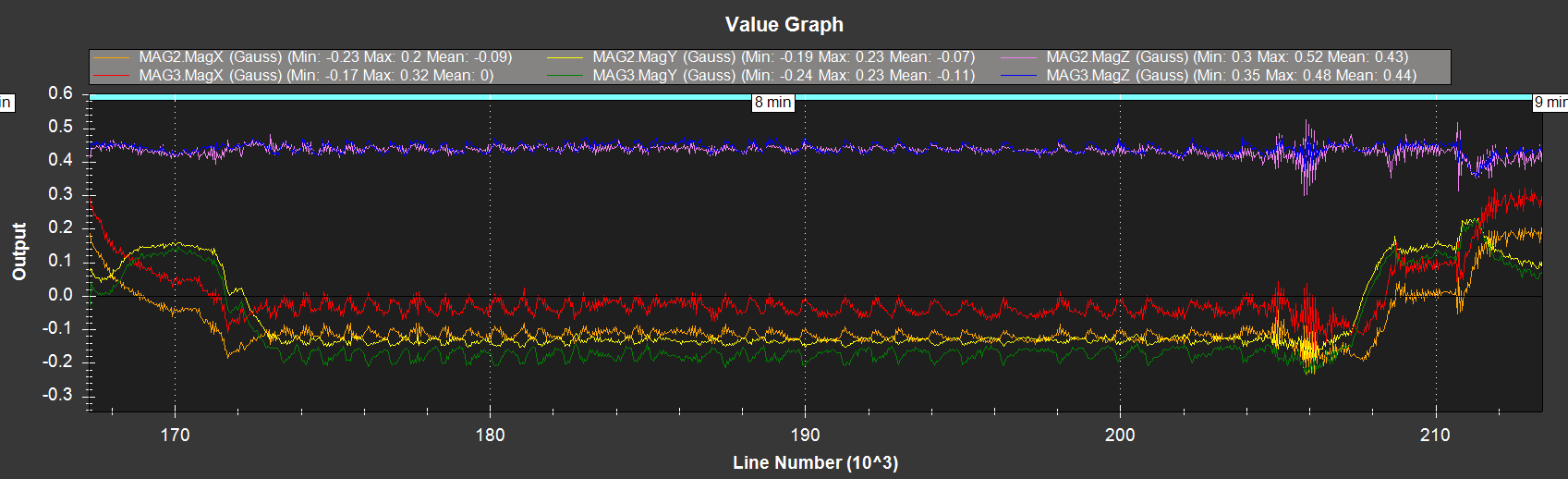
but about mags , we can see some noise on them, its better to put mag/GPS 10cm upper than motors. if it is, you can try motCompass calibration
but there is another problems with your build
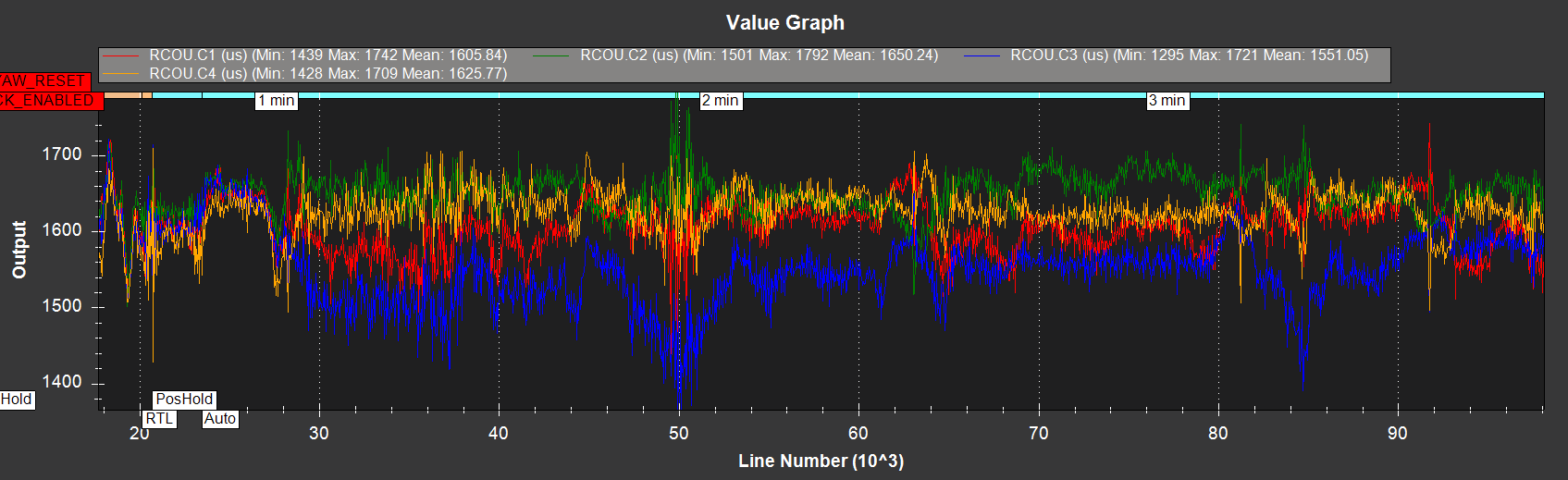
first you have motor overshot , it could because of bad PIDs
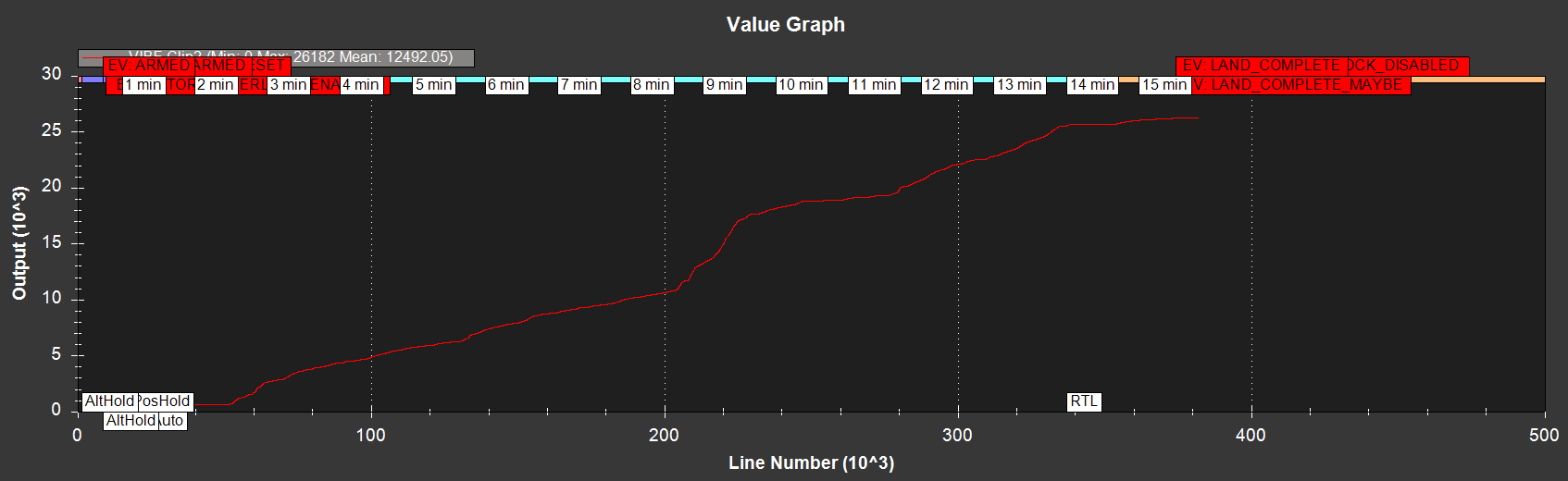
second you have clipping in your logs its meaning that your accelerometer reached its maximum and its dangerius
finally vibration is high , its not too high but it have noisy pattern and its will affect IMU measurement
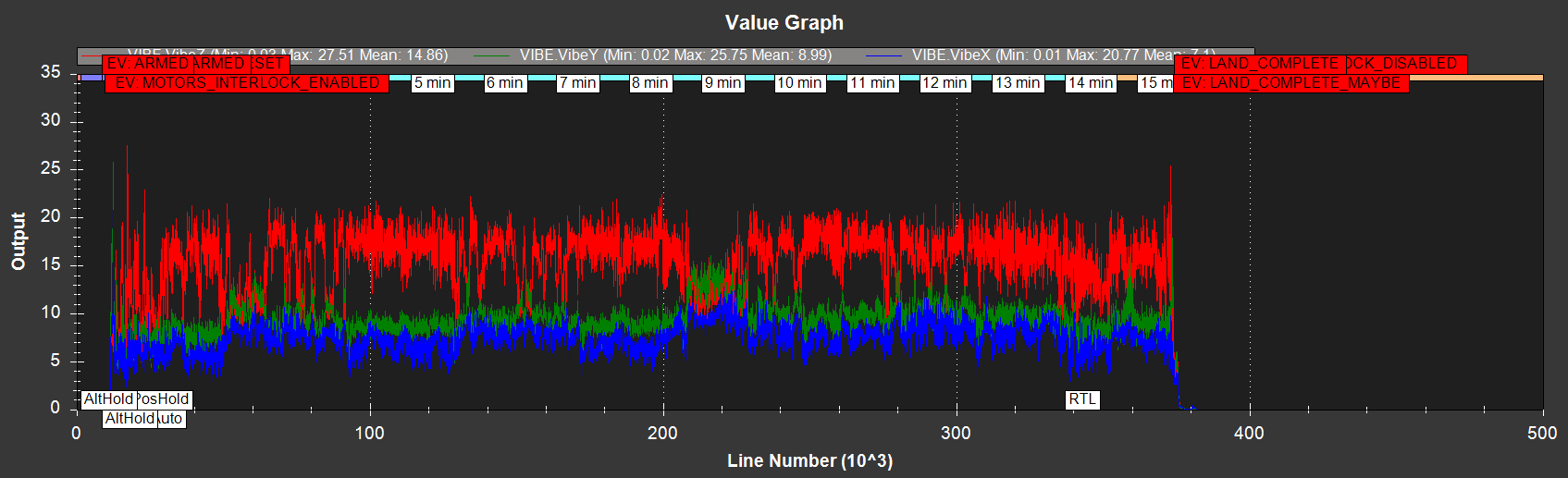
i think this noisy pattern will solve by tuning PIDs
Good Luck!
1 Like
Hi @Hosein_gh
Thank you for looking at the logs. Your response made the issues clear. I hope you can consider my new questions concerning your response.
- I used autotune on this quad, I thought the PIDs seem high… my build is 3100 grams with 12.5" KDE props but I find autotune seems to set the PIDs high and I lack the skill to tune properly, I need to invest time to do this better
- “clipping in your logs its meaning that your accelerometer reached its maximum and its dangerius” - what would cause this and how is it fixed?
- vibration is high… I was able to reproduce the graph on the first log as you did, however I I dont understand why the x, y, z axis never go above 30 , and clip0 and clip1 are at 0 but what causes clip2 to incline? what does clip2 represent? I see a similar pattern on the x8 I recently built where there is low vibe clip0, clip1 are at o but clip2 shows increasing value
Thanks
for a good autotune first you should solve vibration problem
its because of vibration also hard wires could transfer vibration from body to FC
after checking anything in your build for reducing vibration you can setup harmonic notch filtering
I wanted to reply to my original post specifically address the “Clipping” issue pointed out by @hosein_gh The issue was that though the vibes were well within range clip2 reported serious clipping…I actually had this issue on 2 of my copters, (quad and x8) I believe clipping is reporting accelerometer info… there are 3accel . It appears this may be a common issue in some cubes… in this case the third accel I believe is defective. I also believe as long as the first two continue to report ok it would be ok as I have been using my two copters for well over a year with no issue logging 30- 40 hrs on each. I recently resolved this issue by replacing both with new cube orange… on both after initial flights there is NO clipping !