We ran a test flight and the UAV tipped over. Everything looked good, but…
I gave it a little throttle (not enough to take off) and it tipped to the right and back.
Checking the log: the RCOUT shows that the left back motors received the least power (hence tipping that way). Duh. All 8 motors worked together to tip the UAV over onto the back left.
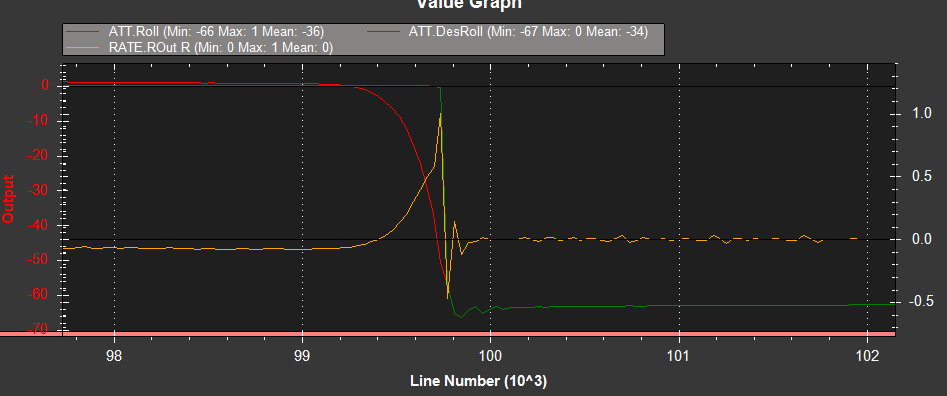
DesRoll and Roll suggests that I told it to tip over to -70 degrees immediately as I gave it throttle (of course the roll control was in the middle the entire time).
The flight controller didn’t want to flip over. In the graph, you can see that the measured roll leads the desired roll, meaning that the tip-over was uncommanded. The orange line is the roll rate output which is positive (right), meaning the flight controller was trying to fight the negative (left) roll.
The desired attitude (and position, altitude, etc.) can be dragged around by the actual. This is a safety feature that prevents copters from thrashing around in the case of large divergences.
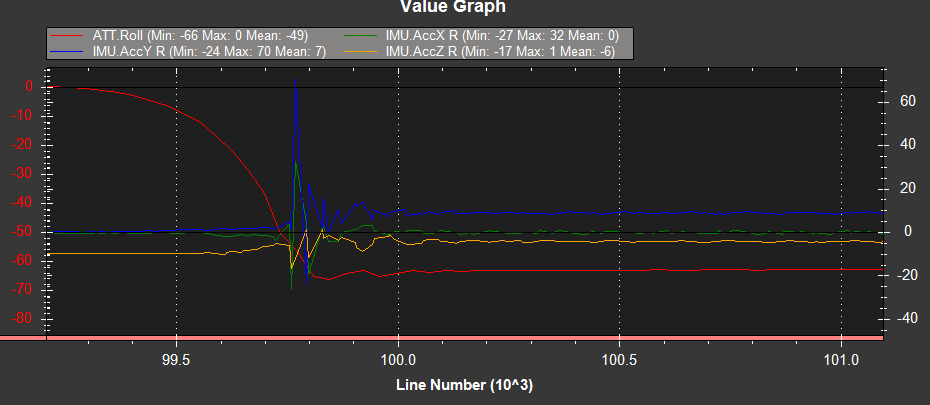
It looks like your Pixhawk is backwards. Is this true? When your copter is tipped over on its left side, your Y accelerometer should read negative, but it shows positive:
I guess this is because your Pixhawk is backwards, which would also explain why it would tip over even with correct motor assignment. If it’s backwards, you’ll need to set AHRS_ORIENTATION = 4 (currently it’s 0).
Edit for posterity: I was wrong, accelerometer Y positive is to the left, so the orientation is fine.
I had the same problem with a new hexa build, That and an over aggressive throttle response. I even turned my props upside down to keep it from flying while I tested it various throttle outputs and clamped it to a table but it still wanted to pitch forward.
I think I may have solved the problem by installing the Ardurover firmware then reinstalling Arducopter, At least it doesn’t pitch when I have it clamped to the table and props upside down now and throttle response isn’t as aggressive. I haven’t had the time for a maiden flight yet but I think that reinstalling the firmware helped.
Without props but armed with throttle at half, do the two right hand motors increase in speed when you tilt the copter over to the right? And two rear motors decrease when tilted forward?
They did yesterday. I am now in the middle of reinstalling Arducopter (after installing Ardurover). I will be running the inside tests shortly (after calibration, etc.).
Sorry, I was mistaken regarding the accelerometer orientation. It is Z positive up, which means positive Y is to the left; I confused it with the EKF body frame, which is Z positive down. Your orientation is correct.
The easiest way to verify correct orientation is to move the copter around while watching the horizon on Mission Planner’s flight data screen.
Flight tested: First flight stabilize was very twitchy, but flew ok).
Autotune flight: Over ten minutes of autotune and flies a bit better (seems unnecessarily twitchy to me, but I am accustomed to the Solo feel).
I am going to continue testing, practicing, and tuning. I want to produce a more stately response.
I appreciate all the advice offered. Thanks.