Hi,
I’m having issues with a new quad build when taking off, it has a slowly accelerating jaw spin that I can’t seem to compensate for with an RC. Apart from that, it seems stabilized and (non jaw) controls seem to work as expected but not 100% sure since I only flew a few cms off the ground.
I have pixhawk and arducopter 4.4, I checked motor numbering, spin directions and props a bunch of times, compass is dual and calibrated, RC channels view in missionplanner seems ok.
I’ll attach the log, it’s hard for me to interpret since I didn’t see the logs of a normal operation.
Does anyone have an idea what to look at?
I’m not finding obvious fixes from searching, I tried changing motors for spares, speed controllers seem ok, I’m assuming this part of the system works fine since drone seems stable when not touching the ground, apart from the spin.
I don’t have a pid/throttle fixture to test motors/controllers. trims seem ok / not changing anything noticable
Learning and looking at graphs more,
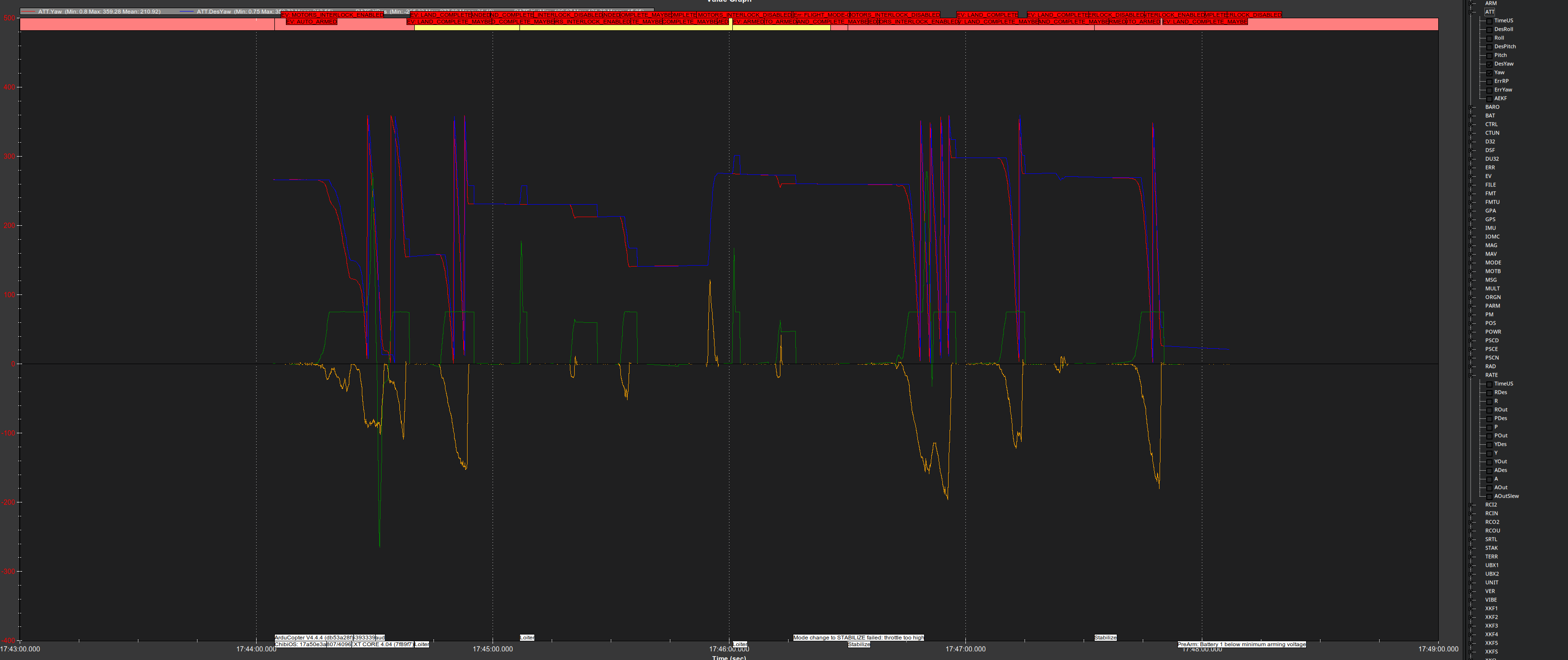
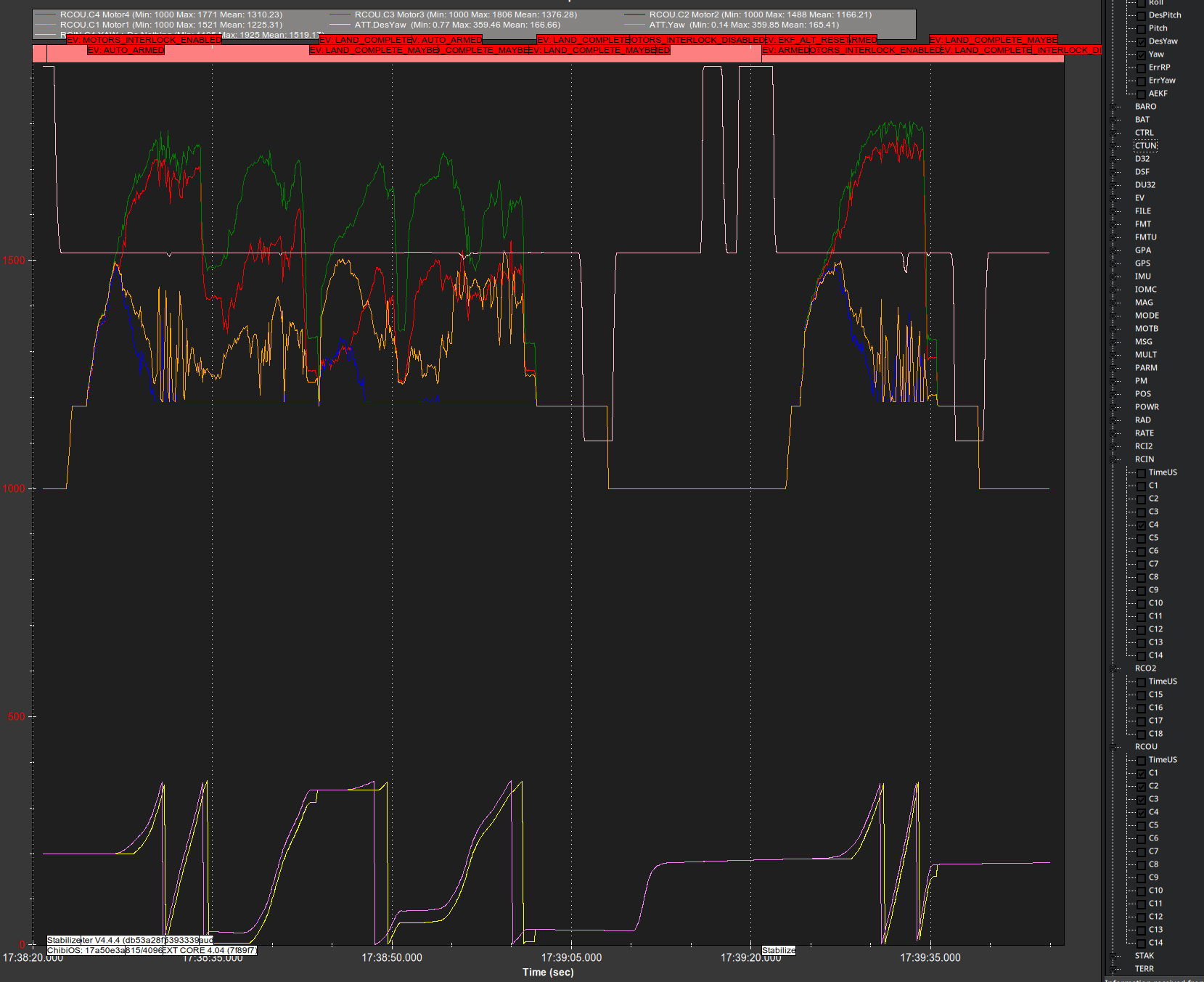
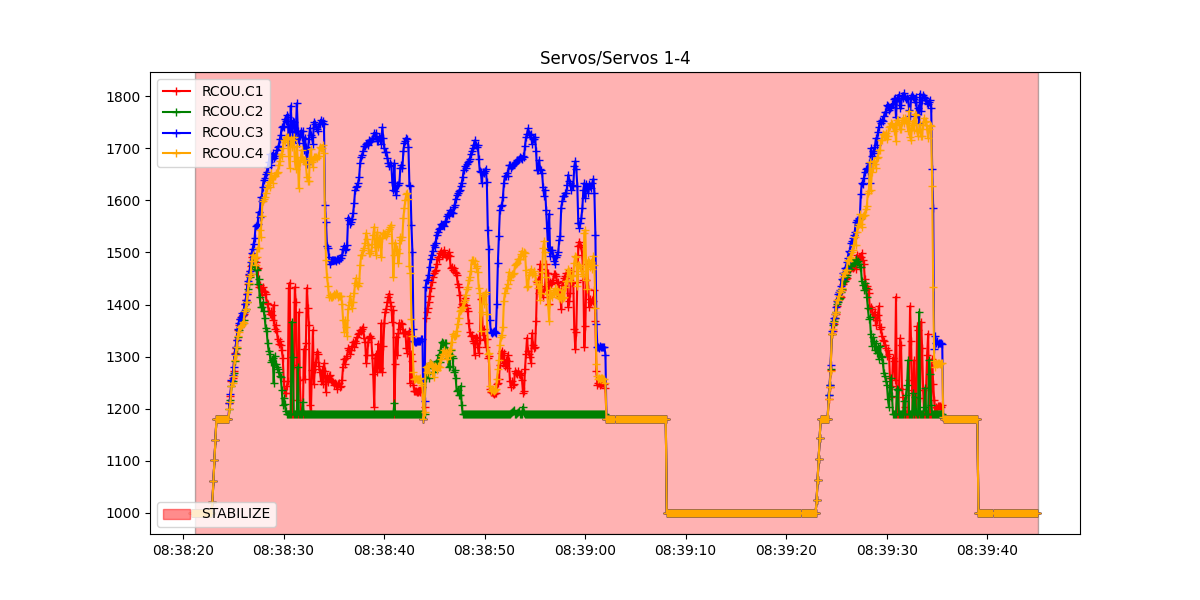
Clearly I see a big bias in power on motors that I’d expect to spin the drone in the direction it’s spinning (red and green),
RC yaw input doesn’t seem to affect the spin? (pink)
And target yaw and expected yaw (yellow and pink at the bottom) seem to correspond to each other, so drone seems to want to spin, and is doing it successfully I also see a bend in my frame with those two motors creating more lift (i’ll fix up the frame, just sorting out the stack first)
I see these flat max values of YAW but I think this happens when drone lands? since this is YAW + “do nothing” value graph? I tried changing the sbus receiver → flight controller cable just in case.
Make sure the props are on the right direction and in the right location. Make sure they are mounted properly and tight.
Make sure the motors are all level with each other. Be really detailed here. 1 or 2 degrees will make a difference. Use a long straight edge (meter stick) and make sure that all the prop mounting surfaces are level with each other. Those round arms can be really tough to get perfect and don’t assume that indexing keys are close enough. They often have a bit of play in them.
you were right, I made a mistake thinking that CW propellers are spinning the drone clockwise, so I thought the signals to speed controller are the ones causing the issue, not that it was trying to correct.
I balanced the arms with a fixture and now the drone is stable, thanks a lot!