marblecreek
(Rover; AP 4.6.0-BETA, Pixhawk 6X CM4)
22
Just starting to lay out my components. For basestation, I have the laptop, RTK GPS antenna (may mount on the barn), and a radio (could use some advice on all these components. Holybro seems to gave good cabling and interoperability, but at a price. Thoughts on the RTK/GPS gear? Am I overthinking the setup and possibly other solutions are just as “easy”?
I have no experience with those exact components but I would think they should work well. I’m using SparkFun F9p boards everywhere with the same 100mW Holybro radios but good, low loss cabling and better antennas for range both at the base and on the rover. (Both rovers are happy out to 3000+ feet from the shop).
Started out having Mission Planner talk to the F9p in the shop which worked great. Kenny Trussell was kind enough to set me up with a Pi that sends RTK data wirelessly to the WiFi and out to a NTRIP server so anyone can used the corrections in the general area when needed. Mission Planner happily grabs that data from the server.
Others will disagree, but I am setup so I never have to approach the mower for engine starting, system arming, throttle/choke, blade engagement, or engine shutdown. I flip two switches (main power and manual E-stop) and do the rest through the 10 channel RC system. To date it has worked well.
I built one entirely from scratch and don’t recommend it. Got lost in the weeds, never cut much grass.
If I did it over again, I’d buy one of those pull behind ATV finishing mowers and bolt on electric gear motors, which would be powered by the alternator on the mower.
A very common GPS unit used on these mowers is the full size ArduSimple SimpleRTK2B boards. These also use F9P chips and they work well with the Ardupilot system, including the automatic configuration process, which keeps the configuration parameters on the GPS boards set correctly when firmware updates come out for the flight controller. The RTK2B boards probably cost a bit less than the Holybro DroneCan F9P GPS units. The DroneCan units do look more like a finished product though, rather than a board you have to mount. I use 2 of the ArduSimple boards in my mower and a 3rd one as my fixed base inside my GPS base station.
marblecreek
(Rover; AP 4.6.0-BETA, Pixhawk 6X CM4)
31
Just followed your lead @SJohnson, and @Yuri_Rage advice in the “best-gear-for-starting-ardupilot-mower” thread. Here are the GPS (starting) components:
marblecreek
(Rover; AP 4.6.0-BETA, Pixhawk 6X CM4)
32
I think I have most of my position/telemetry/electro-mechanicals (but no mounting adapters yet). Take a look at the pic, and let me know if I’m missing anything (other than the battery, wires. . .). I may have ordered too many telemetry radios - should I have 4 units? I just place the 2 I thought I’d need in the pic.
Also, placed a steel ruler between the telemetry radios so you could get an idea of scale - the 400kg servos are giant next to the throttle/choke servos. . .
How many 915Mhz radios you need depends on how you configure your overall system.
You need 2 matched radios (same ID code) in each one so they only talk to each other, for the main Telemetry from the mower back to Mission Planner.
If you need the other pair of radios or not depends on how you deliver the RTCM3 signal from the fixed base over to either Mission Planner or over to the moving base in the mower directly without going through Mission Planner. If your fixed base (GNSS Base Station) plugs into the computer running Mission Planner over USB, you don’t need the other 2 radios.
Yuri posted this earlier that could help.
1 Like
marblecreek
(Rover; AP 4.6.0-BETA, Pixhawk 6X CM4)
35
Yuri - I went big upon your advice - fabricating the mounts now, and have a location in order - thanks as usual for all for the advice…cd
marblecreek
(Rover; AP 4.6.0-BETA, Pixhawk 6X CM4)
36
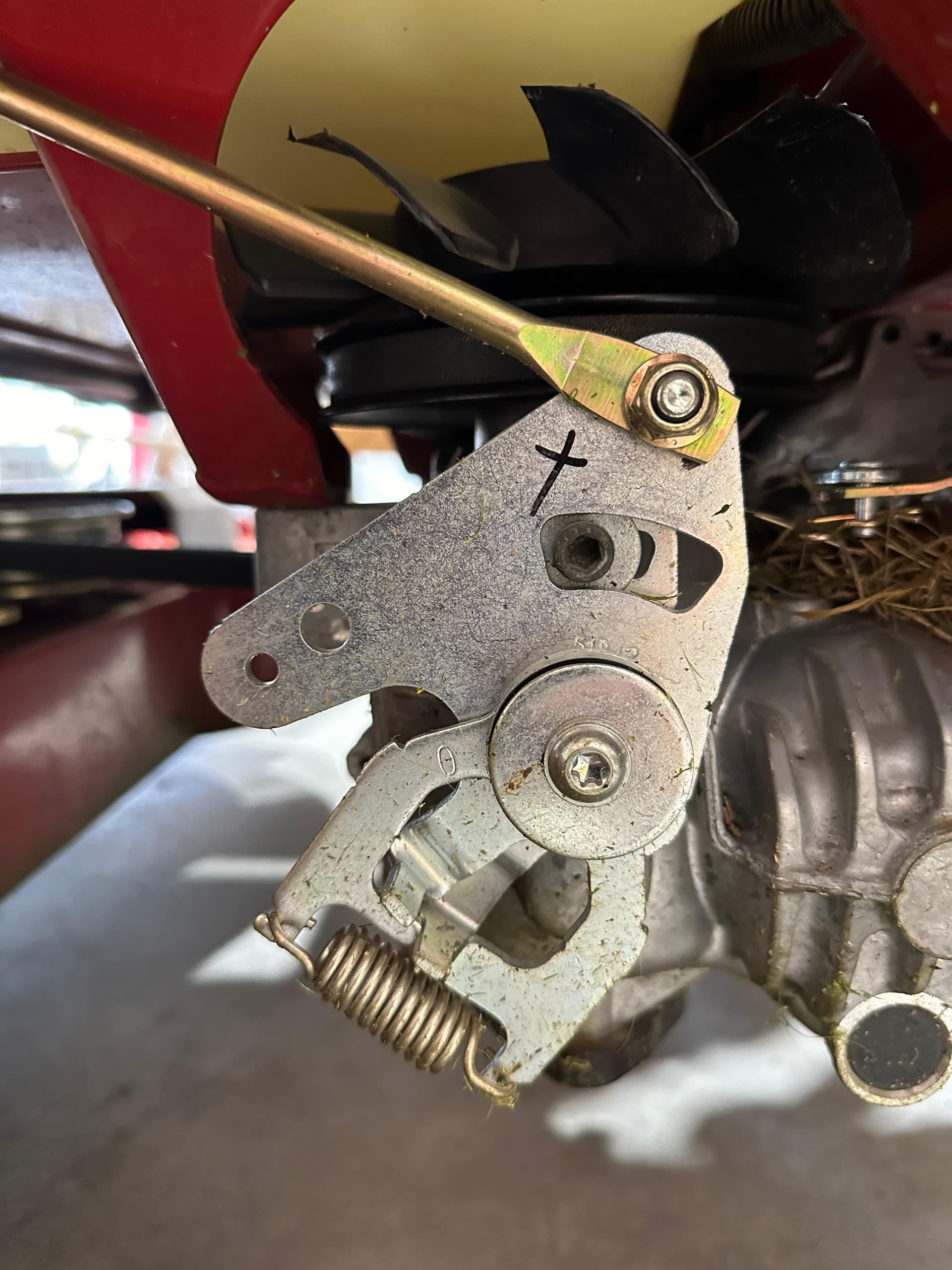
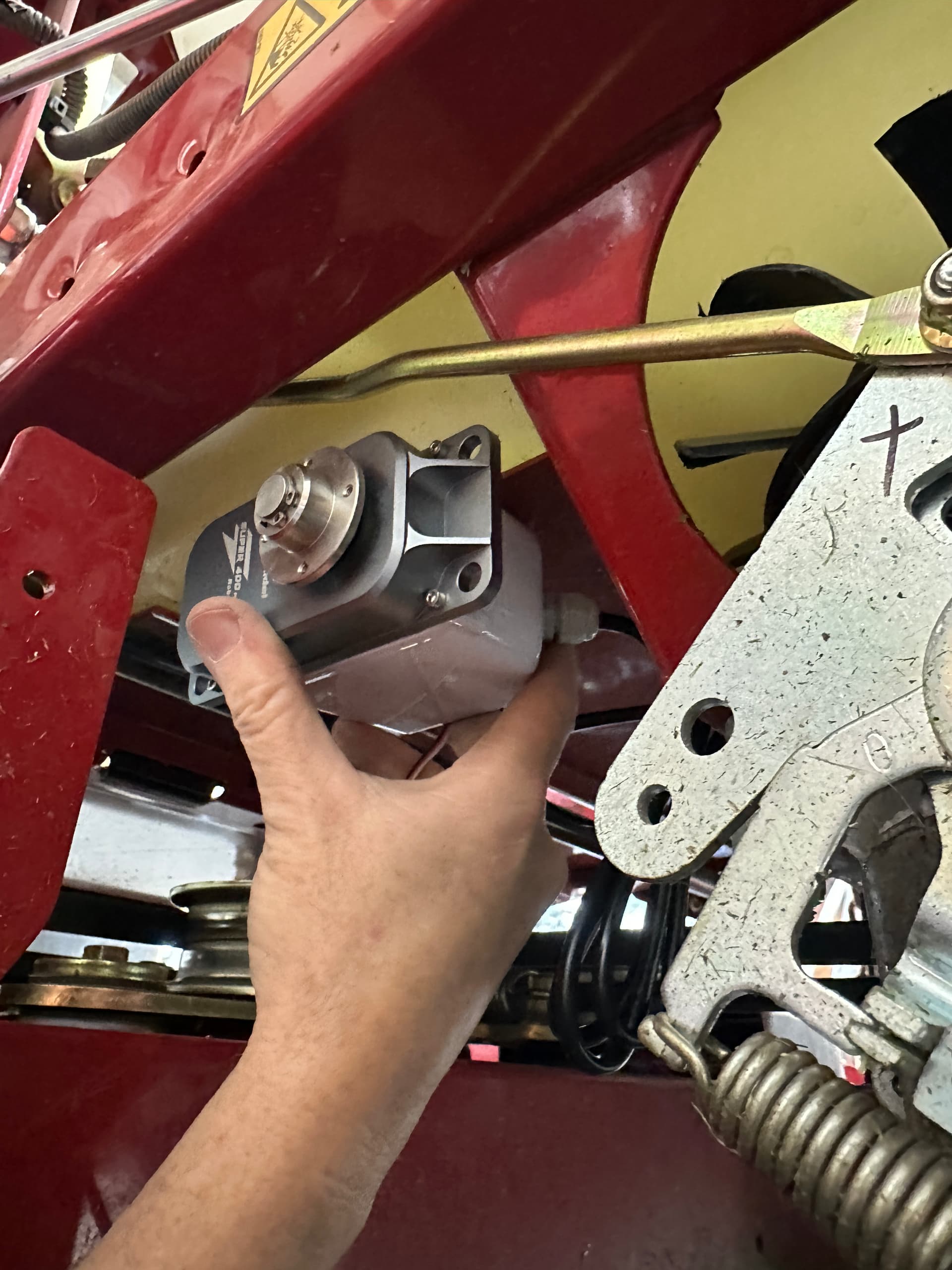
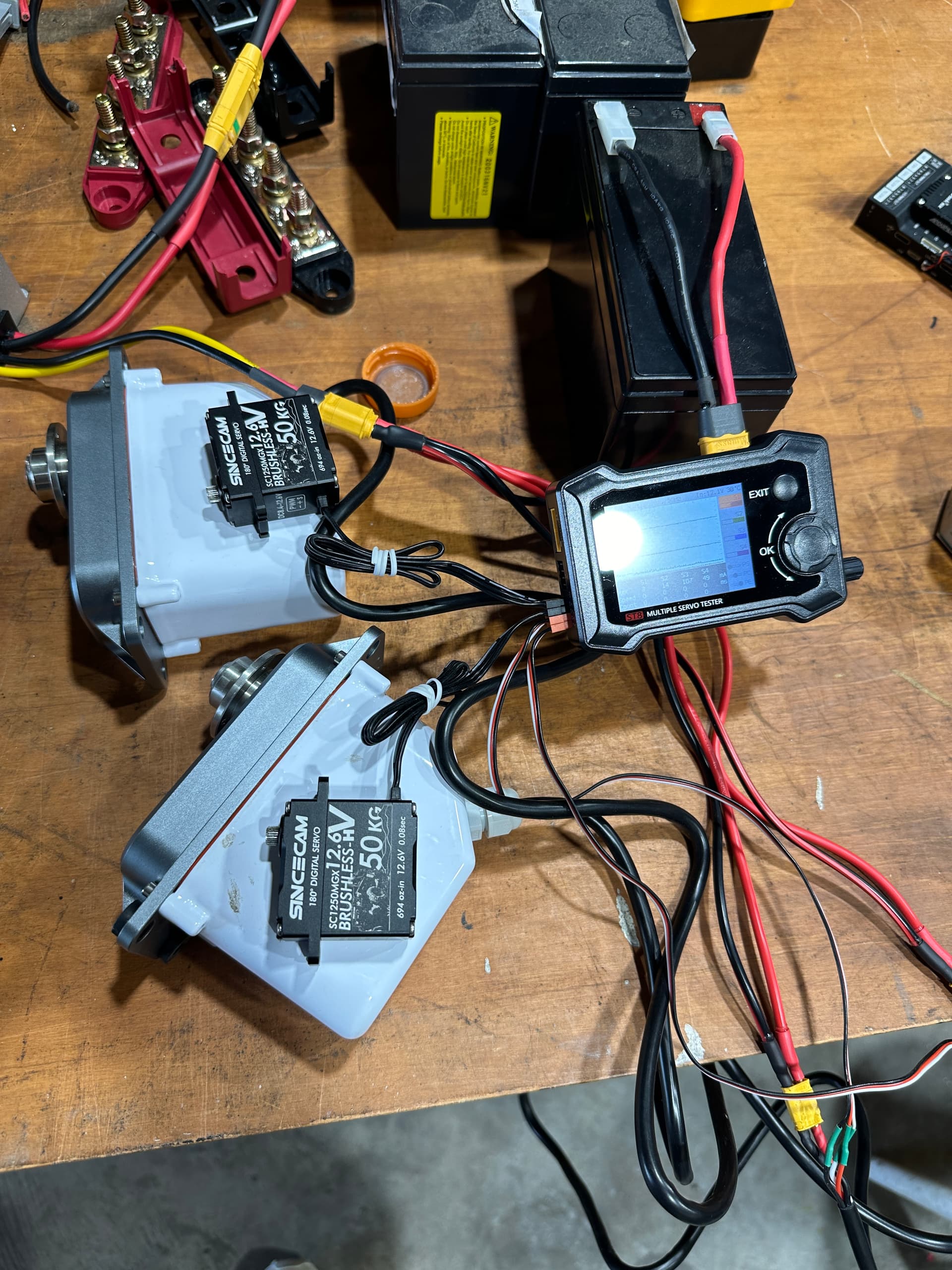
I have fully tested my power system on the bench - will think about physically locating it after Mowstock when I’ve had a chance to see what/how others are powereing their equipment. I used a nice little servo “tester” and have a home for the Happy400 servos - just some fabrication of the mounts and cable routing left to do.
For the Flight Controller, the telemetry went in without a hitch, and the Fixed Base GPS via the Mission Planner computer serial port is working fine (once I found the DroneID panel).
Yaw configuration is confusing me entirely. Not sure how I got the Moving Base working, but it had something to do with @Yuri_Rage 's comments on auto config of the SimpleRTK (without heading) units.
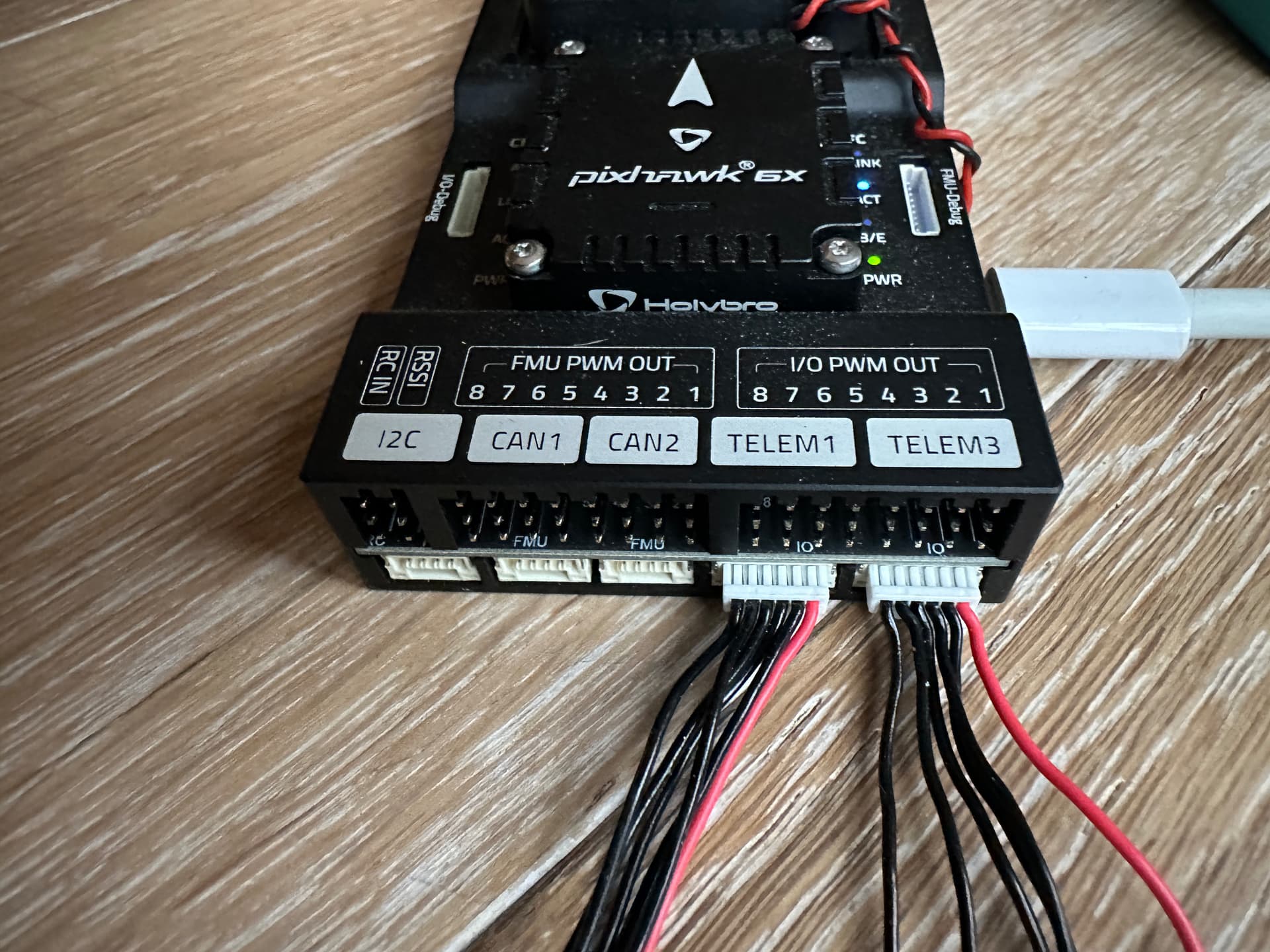
I still don’t understand how to identify the serial ports on my Pixhawk 6 Rpi. I went with Telem3/Serial_3 and GPS2/Serial_5. GPS2 is working, but nada from GPS1 in the Telem3 port (Telem2 is reserved for coms with the Rpi as I understand the documentation - I’m not intending on using the Rpi yet, so no work done there).
My questions are around what actually configures the serial ports, and how will the configuration expose itself as working?
To configure, is it Setup::Mandatory Hardware::Serial Ports? Or, Config::Full Parameter List::SerialX::Baud/Options/Protocol? Something else?
To know something is working from the Flight Controller or Mission Planner, is it the HUD::Lower Left::GPS:No GPS, GPS2:3D dgps? Or, configuring the Quick menu to show GPS status? Or somewhere else?
I’ll bring my gear (not the mower) to Mowstock, but any pointers in the interim much appreciated - I feel like the Pixhawk 6 Rpi is configured slightly different that the threads I’ve been reading.
GPS2 is connected to the Rover GPS - Assumed to be SERIAL_5. I’ve been thinking about building a cable to attach the first GPS unit to GPS1 - something tells me this will solve my issues - should have that done later today.
The carrier board contains a Raspberry Pi compute module that renders Telem2 (SERIAL2) useless for anything other than communication between the compute module and the autopilot.
Share the labels on the ports where your GPS modules are presently connected as well as your current param file, and I’ll likely have you sorted.
Might also help to see a pic of the GPS modules and their wiring.