@kd0aij - Thank you for that!
reminder, the driver may not be in the Plane v.3.8beta* versions. Best to upgrade to official v3.8.x
@Jordi Please in the meantime. To save the time of experimentation. Can you please let us know which tube is top and which is the bottom. With the new style of orientation. No one really knows but you.
You know, this is relevant to the settings in the airplane parameters, so we can have it fixed (which is more desirable) and not autodetect.
PS: If anyone knows the answer, don’t be shy.
I started out testing with the 3.8.0 beta and then later upgraded to 3.8.0 release, did not see any change in the offset error.
Hope this helps.
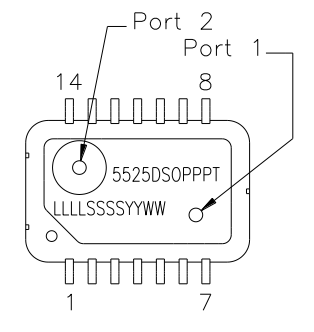
You need to connect it to port 2. Port 2 is the one closer to the “cut corner” of the sensor. Refer to this image:
Warmly,
So port 2 is “top”? As in dynamic (and port one the static) if parameters are set to 0 in tube order?
Just to be on the same page 
If so, then thank you, I got it, but is see a whole lot of confusion from new users who see this picture in the future as the. naming is quite counter intuitive. I would have named it the other way around.
Albeit I am not 100% if I understand you correctly due to your poor choice of words “connect it…”.
It count be anything and there are two tubed to connect. The key is which one to which port.
I agree that Jordi’s image and narrative aren’t well-aligned with Ardupilot terminology for digital airspeed sensor tube connections, and this will lead to pilot/builder confusion.
Kelly
Hello Pompecukor,
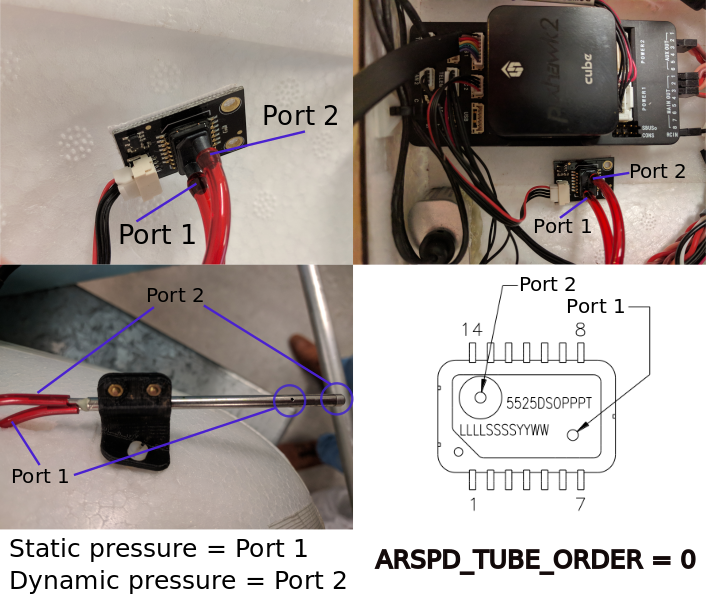
Sorry for the confusion. I didn’t choose the name, I got that image for the datasheet. So yes, based on the imaged I shared:
Port 2: Dynamic port (Pitot Tube).
Port 1: Static port.
Can you explain “if parameters are set to 0 in tube order?” ?
Cheers!
Thanks for clearing that up (for us).
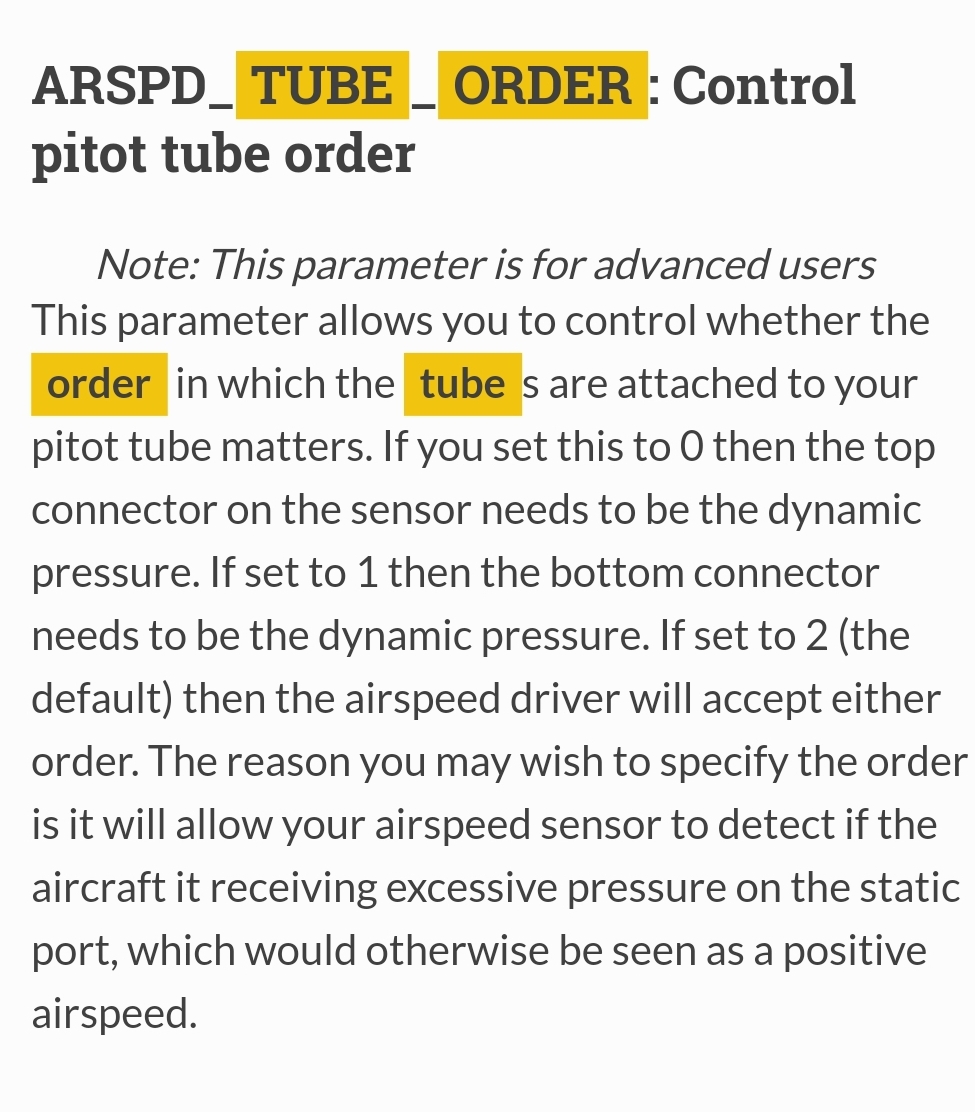
As you can see, it is a parameter that we can set in Ardupilot. Called tube order.
It is possible to use auto detect, but safer on the long run to have it fixed. As explained above in the last sentence.
Amywau not then end of the world.
Thanks for the clarification I was personally using the autodetect option in my setup.
Now, if you want to leave it static, just choose any of them and try applying pressure on port 2 and see if the airspeed goes up, if not try the other value. I will try it myself to share the correct setting but I won’t be able to do it until next week.
Warmly,
@223Wylde A minor bugfix was recently merged to master which should improve airspeed accuracy near zero m/sec. (note that this bug affected all airspeed senors, not just the 5525) Please give it a try to see whether your 5525 still shows " 1-5m/s after power up, this is with the pitot tube covered"… My testing indicates airspeed < 1m/sec with no airflow over the pitot tube, and it appears to be repeatable in the 1-5 m/sec range with only minor drift (~ 1 m/sec) over 8 hours.
Ok great, will do, haven’t been flying my fixed wings for a while, but should have time to test that soon, will report back here with the results…
Hi,
I’m posting my configuration to hopefully remove some confusion / be helpful. This configuration has been ground tested and flown with ArduPlane 3.8.2.
Note: The sensor is connected directly to the I2C port labeled I2C 2 on the carrier board.
ARSPD_AUTOCAL 0.000000
ARSPD_BUS 0.00000
ARSPD_OFFSET 55.642334
ARSPD_PIN 15.000000
ARSPD_PSI_RANGE 1.000000
ARSPD_RATIO 1.627000
ARSPD_SKIP_CAL 1.000000
ARSPD_TUBE_ORDER 0.000000
ARSPD_TYPE 3.000000
ARSPD_USE 1.000000
Be very careful when changing the ARSPD_OFFSET and ARSPD_RATIO parameters. The values posed above work well for me but use caution when changing yours. Your sensor may require different values and getting them wrong can result in a stall / crash.
Cheers,
Sam
1 Like
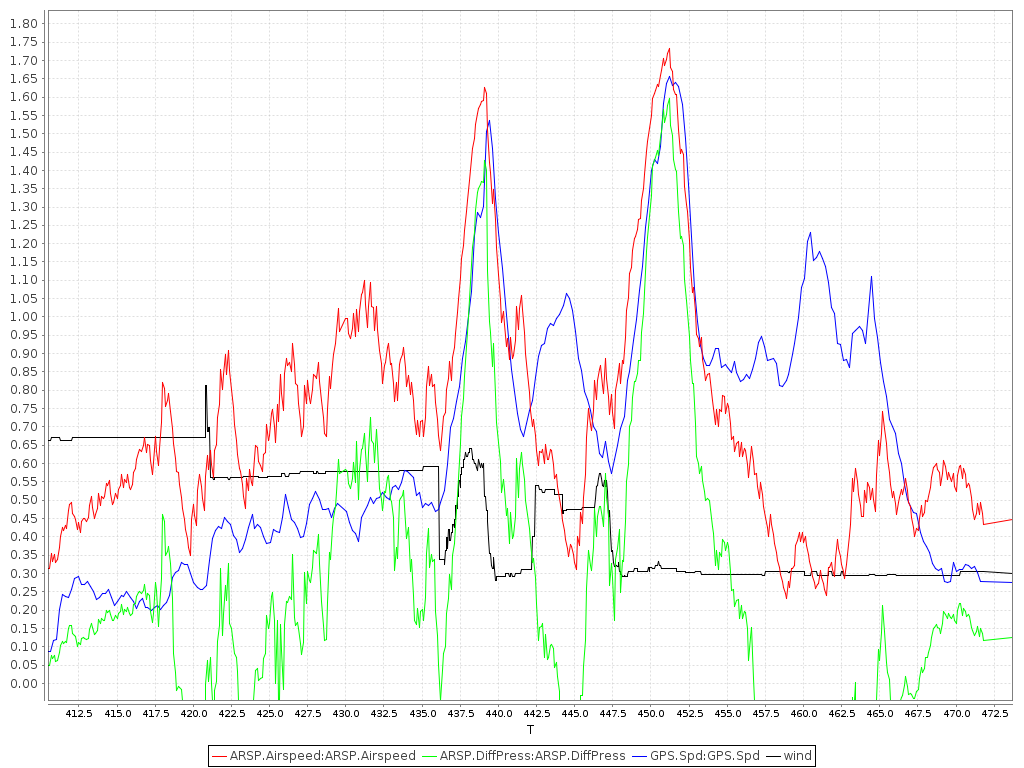
The MS5525 looks pretty good at measuring low airspeeds. This plot is heavily filtered diff. pressure, airspeed and gps speed from my first E-Flite Convergence hover test


1 Like
This is a plot of airspeed North/East components (plus EKF wind estimate) vs. GPS speed components from flying slow circles while doing yaw tuning of my Convergence VTOL. I’d say this pitot system with the MS5525 is doing very well at measuring very low airspeeds, and that it should look even better at normal cruise speeds.
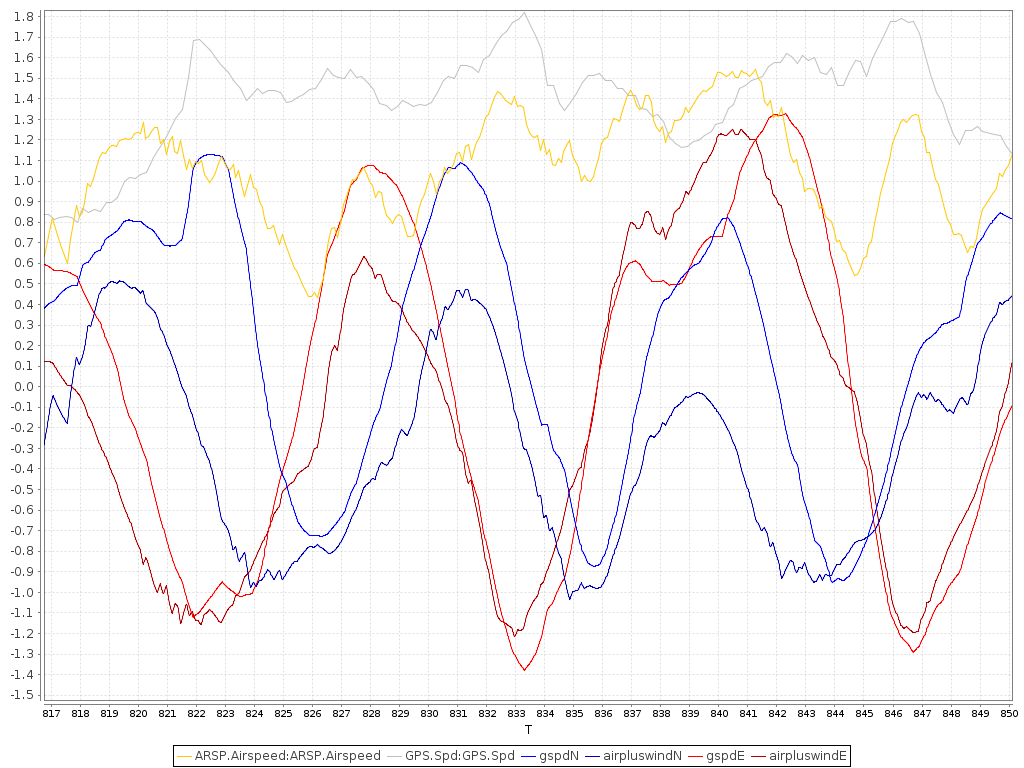
Yes, everybody is happy with the precision. Obviously better than the predecesor.
What needs fixing is the preflight calibration offset issue that has been reported and discused in lenght in this thread.
There’s no “offset issue” apparent in my testing; do you see one in my plots?
First flight of my E-Flite Convergence with the mRo MS5525 airspeed sensor.
@Jordi looks great!
parameter values:
ARSPD_RATIO 1.993600
ARSPD_SKIP_CAL 0.000000
ARSPD_TUBE_ORDER 0.000000
ARSPD_TYPE 3.000000
ARSPD_USE 1.000000
1 Like
The noise is much better than that of the 4525DO chip:
But i also noticed the sensitivity to device orientation.
Regards Rolf