I’d like to start this post by apologising to those who have been waiting patiently for this design to be released for a long time now. Without getting into the details, expired CAD software licences that I couldn’t afford to renew, cheap and unreliable 3D printers, and unrelenting pressure from work got in the way. I’m hoping “better late than never” still applies.
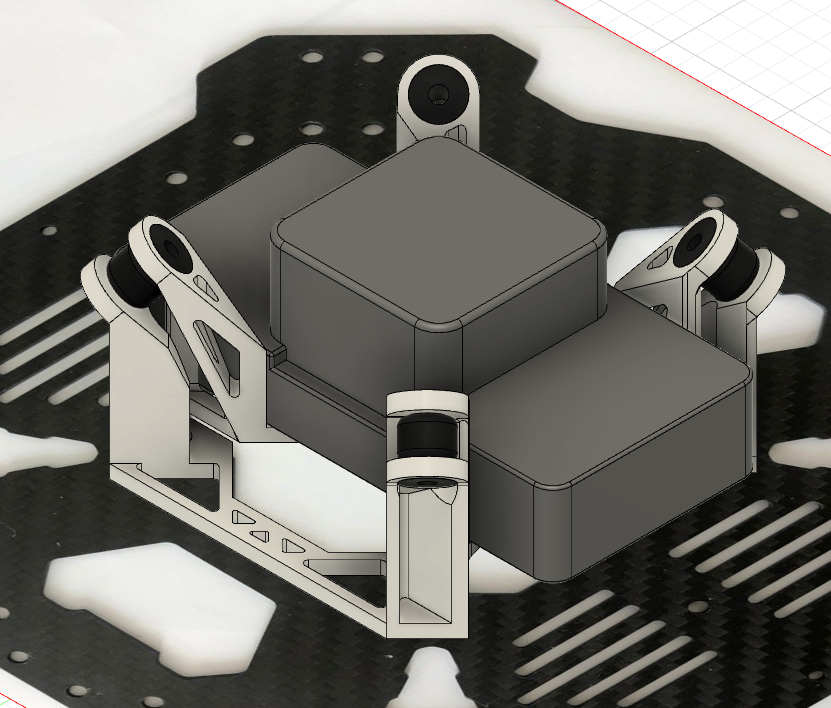
With that out of the way, I’d like to introduce the next generation of anti-vibration mounts designed for the Cube:
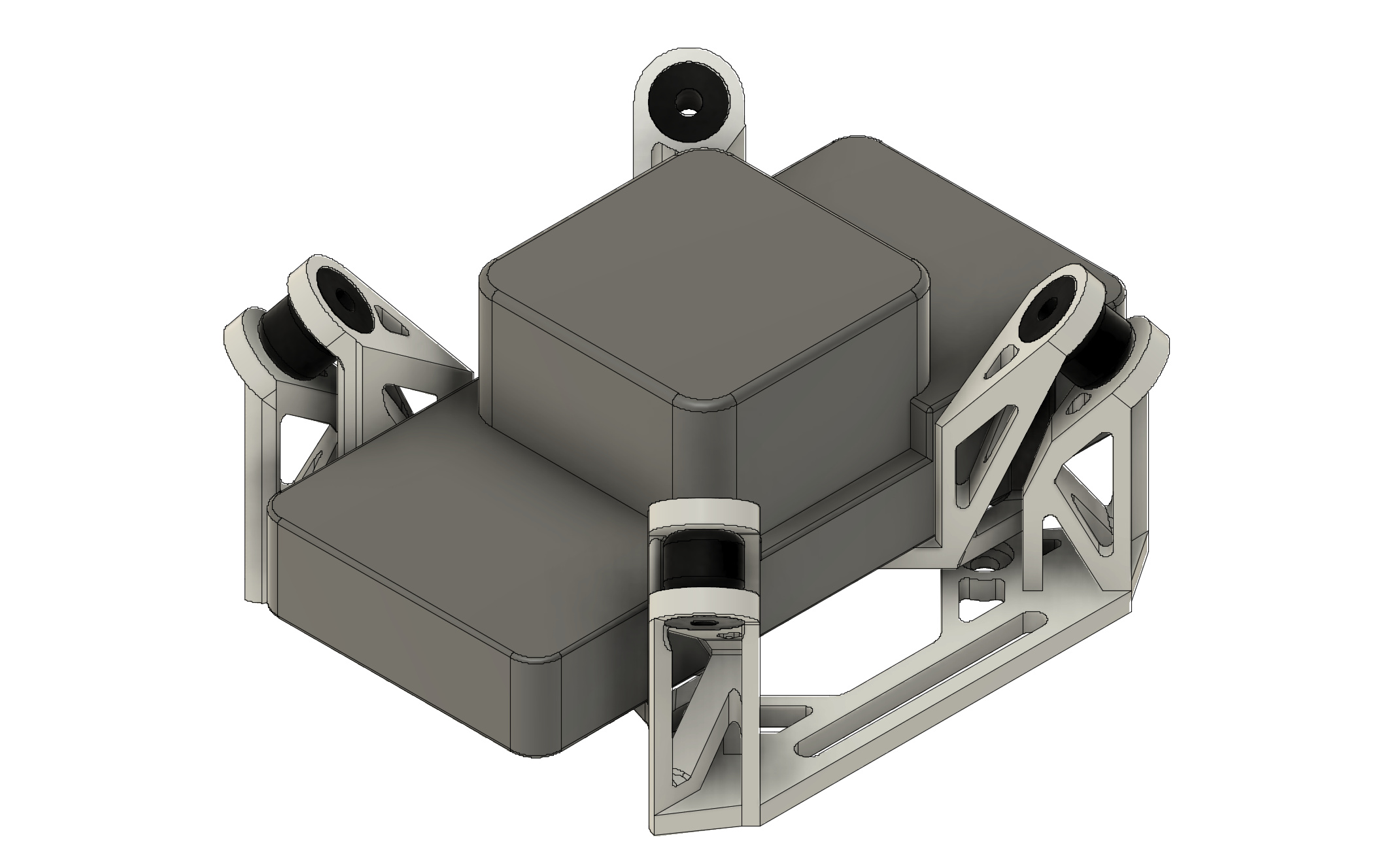
Design features:
- Centre of rotation inline with IMUs to ensure rotational vibration is not translated to lateral acceleration
- Less than 25g including mounting hardware
- Easy to print, and uses widely available parts
IMPORTANT, PLEASE READ BEFORE USING THIS MOUNT
All version of the Cube with the exception of the low profile purple version include internal vibration dampening. You should not need a seperate vibration management solution for the vast majority of applications. Before considering this mount, it’s highly recommended that you do the following:
- Enable IMU logging, and confirm you have excessive vibration
- Inspect motors and props for damage, and check that props have been properly balanced
- Ensure motor retention bolts are properly secured and held in place with Loctite
- Make sure there is sufficient slack on all cables going to the carrier board to prevent vibration transmission
- Check that camera gimbals, spinning LiDARs, and any other sources of vibration are properly isolated
This mount may degrade performance when used in situations where it is not needed!
Print Instructions
The design has been optimised for 3D printing using a 0.4mm nozzle, 0.2mm layer heights, and no supports. Suggested materials are PLA or PETG. ABS can be used, but you might have a problem with the parts lifting from the print bed unless you have an enclosure.
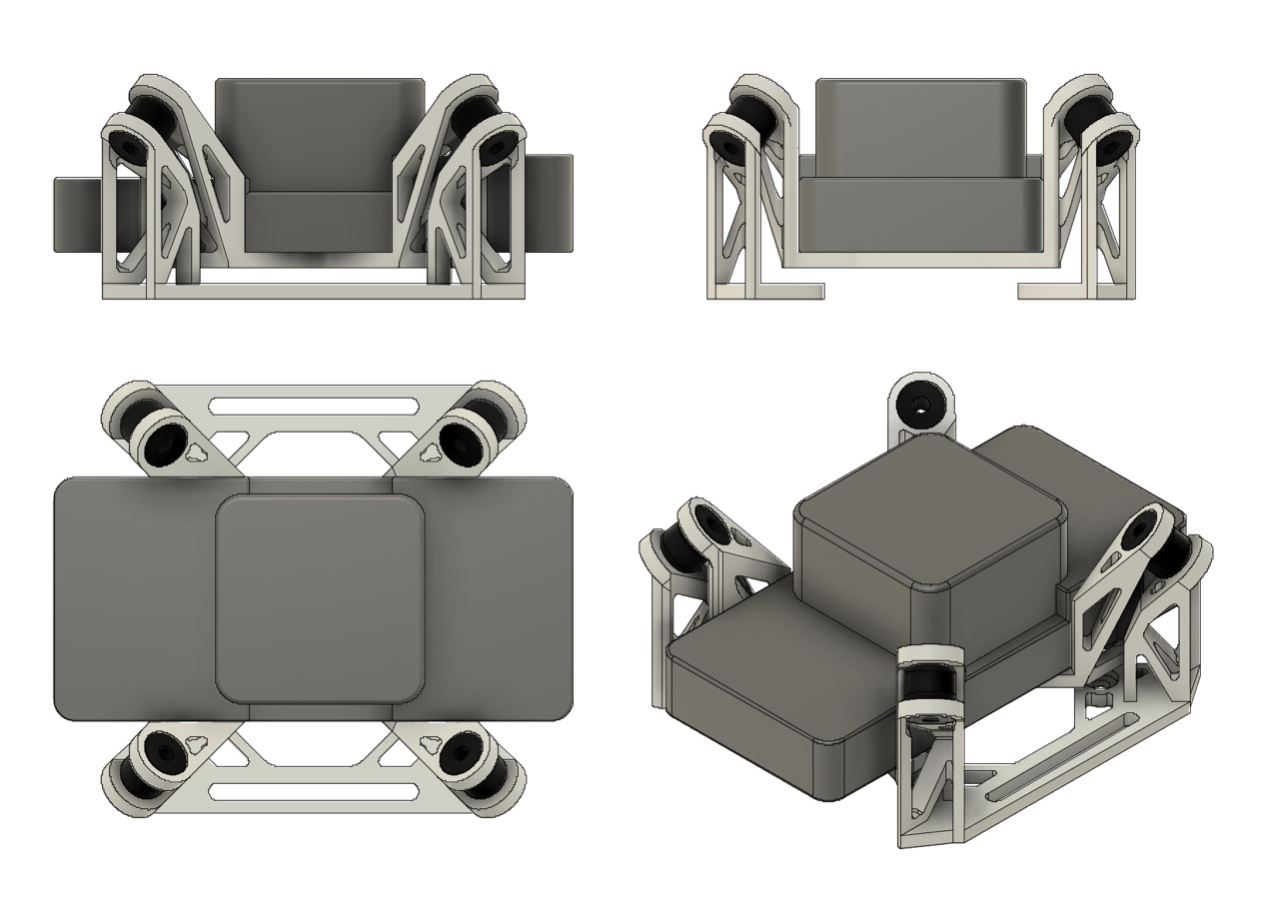
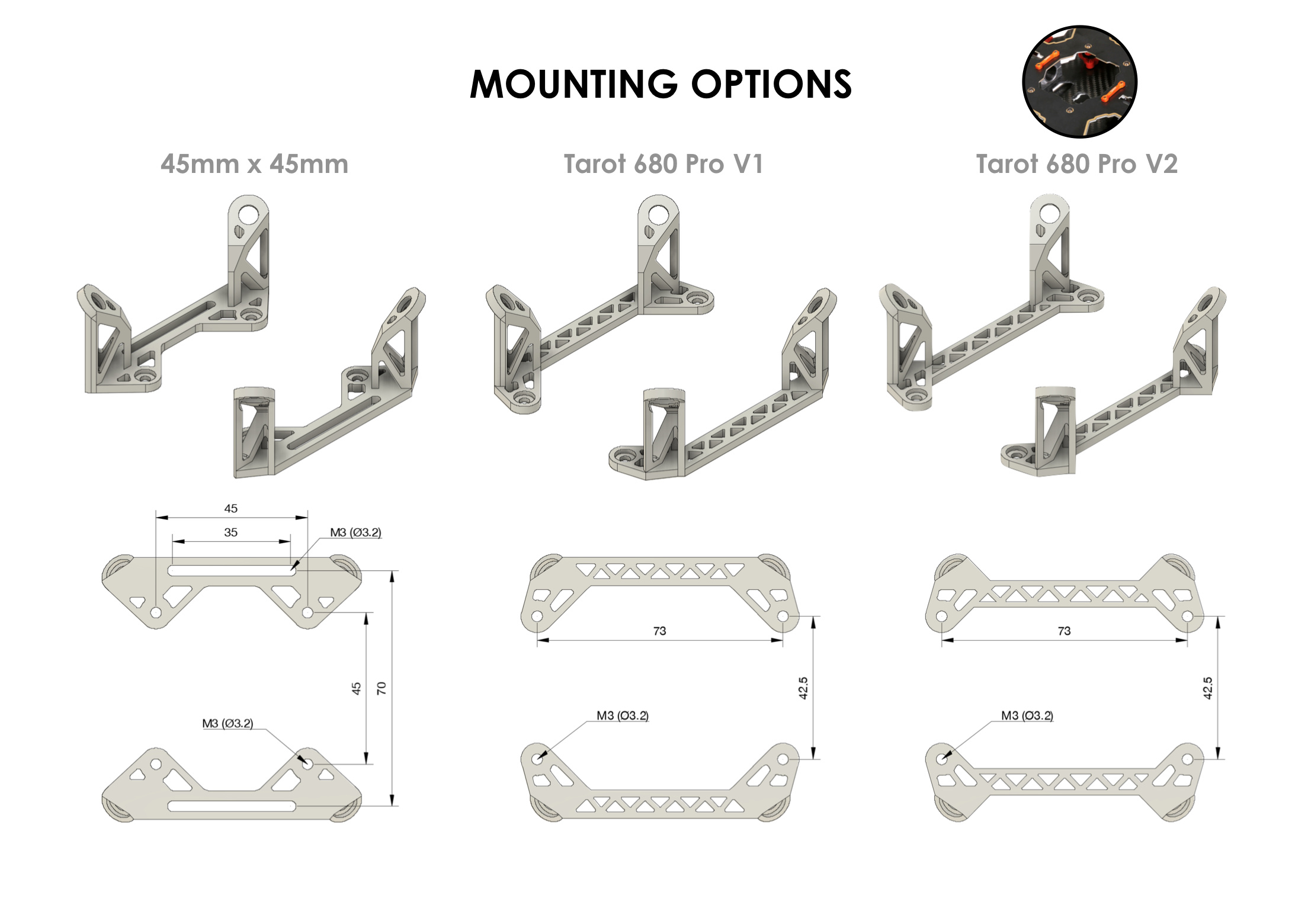
Two versions are provided, a topology optimised version that may be challenging to print with certain materials and machines, and a simplified version that’s slightly heaver but easier to print. Each version has mounting patterns for 45mm x 45mm, or 73mm x 42.5mm (compatible with the Tarot 680 Pro). If you would like a version with a custom mounting pattern, I’d be happy to assist. All I need is the dimensions of the mounting holes, and any cutouts or features I need to include.
Parts Required
- 13mm x 9mm⌀ silicone dampeners (Example)
- 25mm x 50mm double sided tape (Preferably 3M VHB, but you can also include what was included with the Cube)
- 4 x M3 bolts
Non-Commercial Licence
The files are being released under a Creative Commons 4.0 Attribution, Non-Commercial, Share-Alike licence. This allows hobbyists, researchers, and operators to print their own mount (or have someone print it for them) and benefit freely from the design. Users can also modify the design to suit their own purposes as long as they share their design with others under the same licence. You’re welcome to print the mount for others and recover material costs.
If you want to include the design in a commercial product that is sold to others, or use a 3D printer or service to produce and sell the mounts separately, please contact me. In order to support continued development and innovation, as well as recover the initial development costs, there is a one-off licence fee of $199 USD which grants perpetual commercial usage rights, or alternatively a 10% fee for each individual mount sold. Custom design enquiries are also welcome.

For the next 2 months, all proceeds will be going towards the charity Raleigh International. In September, I’ll be heading to Costa Rica for 3 months to volunteer my skills to manage education and sanitation projects that benefit marginalised indigenous communities. If you’re interested in tipping me for the work that’s gone into this design, you can do so here. Donations qualify for Gift Aid and Tax Relief for UK residents.
If you’re based in Australia, I’ll send a mount your way for donations of any amount. You can donate to my fundraising campaign here (all donations made via this page are transferred directly to the charity):
https://uk.virginmoneygiving.com/fundraiser-portal/fundraiserPage?pageId=1087146
Please send me a private message with your address details to claim your mount. I have enough components for a dozen or so immediately, but there may be short a delay if I get a significant number or orders.
Feedback
If you have any constructive feedback on the design, suggested improvements, or would like a customised version to suit a popular flight controller or airframe, please feel free to comment below or contact me privately at guymcc at gmail dot come.