nothing wrong isn’t it?
but this what happen in the real flight as we can see it should turn once once
but it make turn “forever” it was out from that circle because i take a control manual (out from AUTO)
*fastforward 16x
please any “even” guessing theory are welcome, i’m afraid this happen again (lucky this time still in my range to take over)
So on Mission Planner you can go to Simulation Tab. This is really useful as it will simulate the actions your plane will take and show you the exact behaviour of it while in the “air”. In the Simulation Tab you select the vehicle you want Plane, Rover, Multirotor etc. Then simulation will start and from here you do what you normally do with a real plane. You create your mission and upload it. Make sure you add a takeoff for the simulation plane to go flying even if in reality you won t have a takeoff command. Then you must send arm command to your (simulation) plane and if you put it into auto it should start flying. You can speed up simulation speed by changing the paramete SIM_SPEEDUP.
OMG! there is in front of my eyes from long time ago but I have never tried it
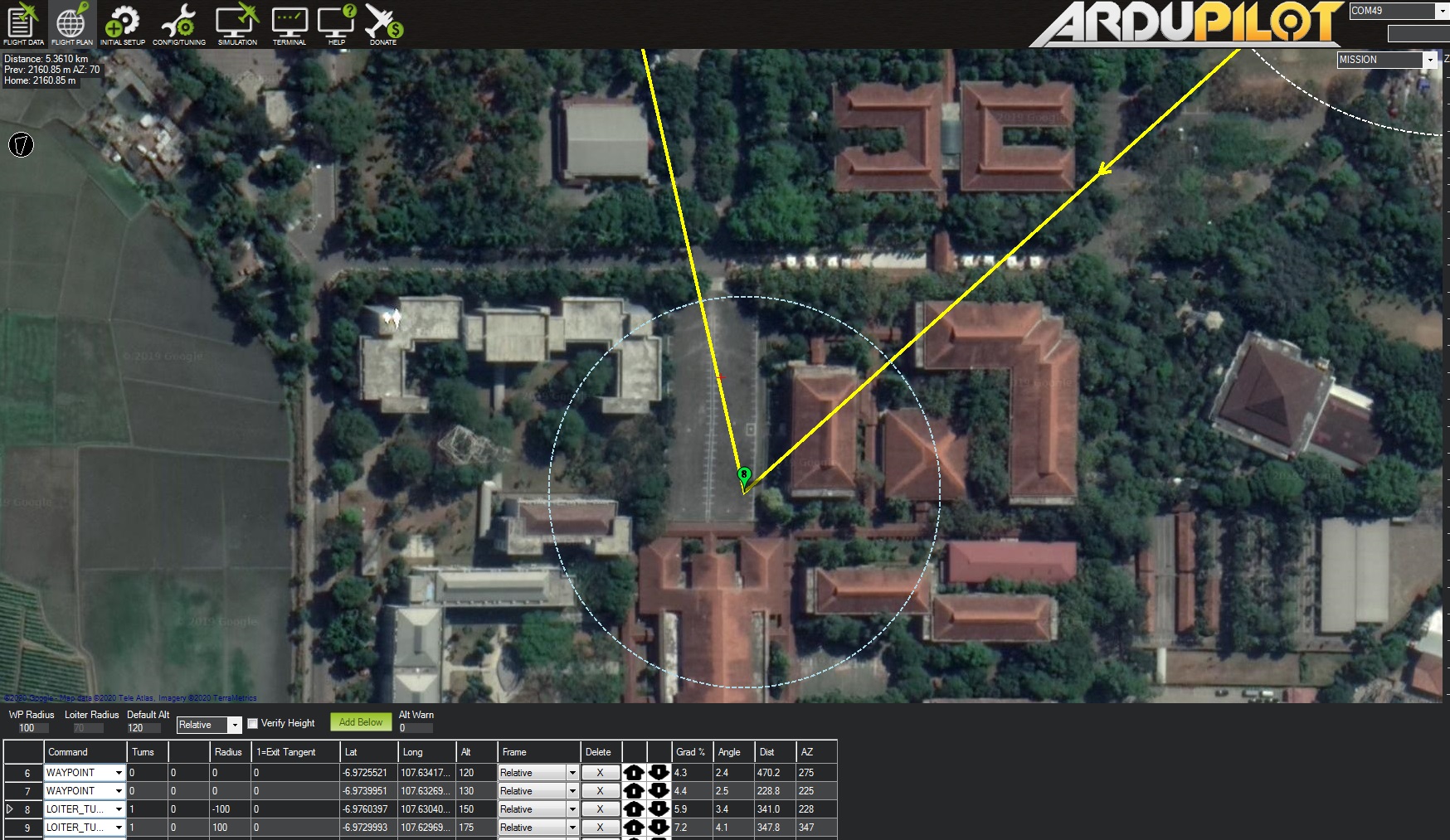
oke i just running that simulations and i put my save WP into it
and it circle only once
so i guess like i mentioned from my 1st post, there are nothing wrong with the WP i have made
it seems from the arduplane firmware, yeah i’m always using the latest one never using a stable version.
time to flash to the stable version then
hey! i’m appreciated you pointed to this simulations, really really new knowledge for me i never realise MP have this fiture since long time ago
haha you are welcome, try have a look around the software MP, you can find out some really interesting features. Hope the simulation feature helps you out in the future.