Hi,
Setup:
- Cube black
- NEO V2 PRO GPS, UAVCAN
- Firmware version 4.0.4 rc1 and 4.0.3
- Power and telemetry trough USB
- Nothing else in setup
I’m a bit concerned that if no accuracy estimate is available, how autopilot will behave on poorer GNSS conditions. That accuracy value is fed to EKF to my best knowledge.
Is this a CUAV software problem or not?
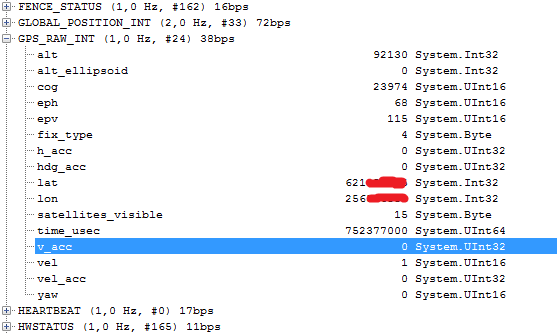
Caputure from MAVLink inspector.
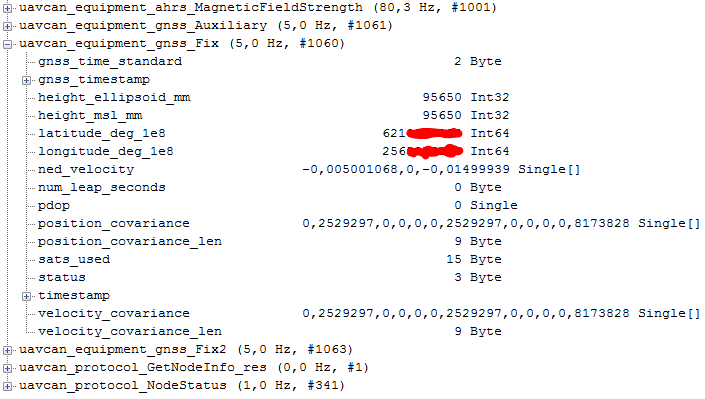
Capture from UAVCAN inspector. As you can see the position covarience values aren’t as expected.