If I lift the drone when it is not armed the altitude results to be more or less correct (50cm of error) but once I start a mission (in my case it has to reach 2 meters of altitude) the altitude is wholly messed up and it’s going under zero, resulting on an endless take off because the drone never reaches the requested altitude ( Video example).
In the parameters, I set EK3_SRC1_POSZ= 1 (Baro)
I use a PX4 3DR with this barometer: MS5611
Arducopter V4.3.4 Official
Do you have any idea what could be the reason?
ps. I’m not using GPS, I’m using intel real sense camera for indoor flight
pps. In the video there is the warning “bad OptFlow health”: I recently installed an optical flow but before this flight I removed it, btw I don’t think it is the reason for the strange altitude behavior
Disable optical flow and tune the copter properly in stabalize mode. After that add a GPS and test it in loiter mode. Once all is tunned and you have no performance issues, remove the GPS and activate optical flow. Then fix your optical flow issues, and btw optical flow does require a range finder to work properly.
Taking shortcuts will only waist your time and ends up being a lot more expensive because of all the parts you break by taking the shortcuts.
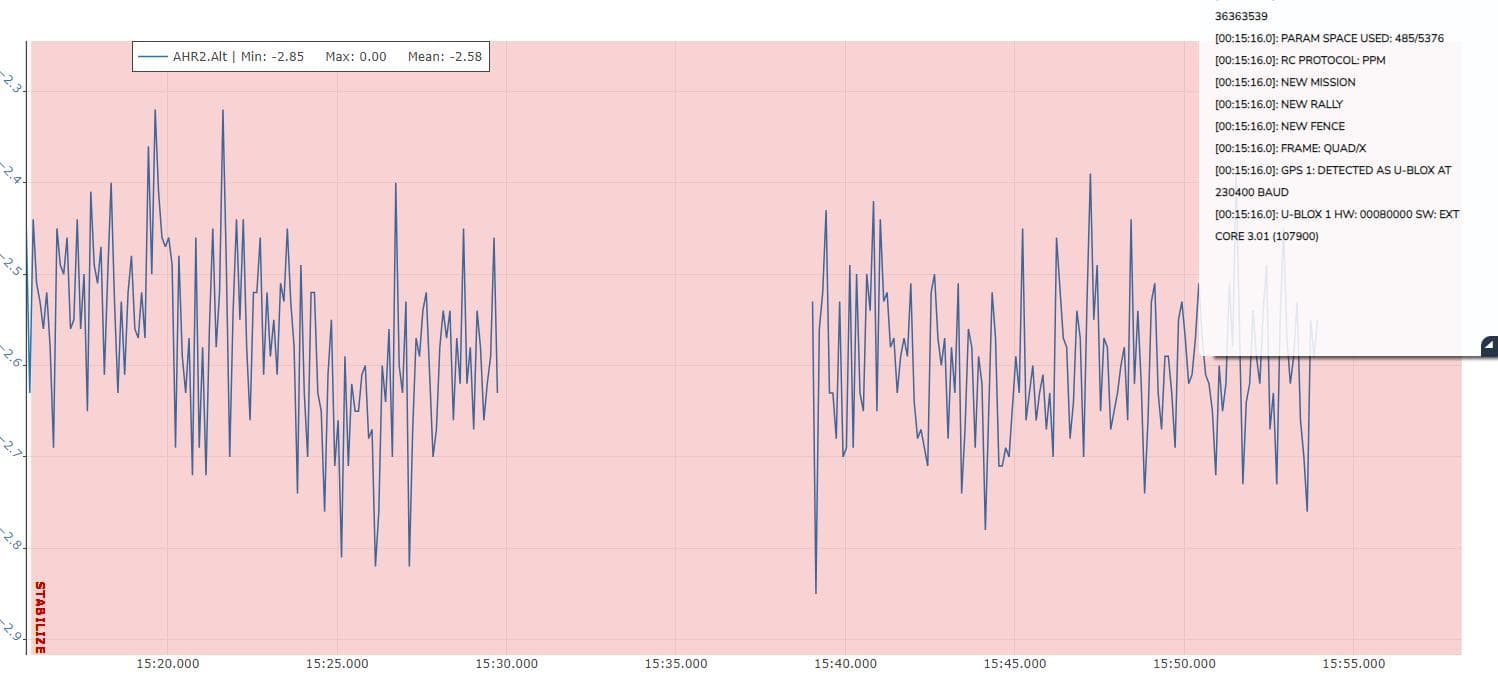
Negative altitude only happens before arming, once armed the altitude jumps to zero.
I have this issue i was using the tfmini S lidar and i get only negative reading. Even the screen in the laptop with mission planner freezes and doesnt show anything there is no GPS satellite count too, i was flying in the open space.
No clue on what really happened. What i was doing was the first flight test. I was flying the stabilize and ALT HOLD and it was the problem. I wanted to perform autotune but i think it is not good idea to do that before i solve this problem.
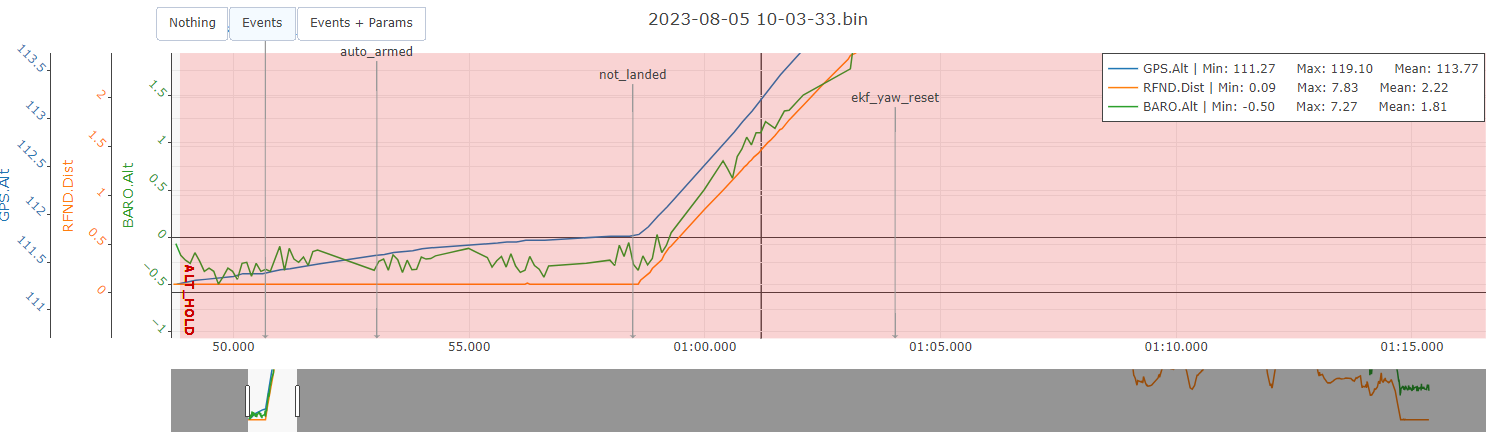
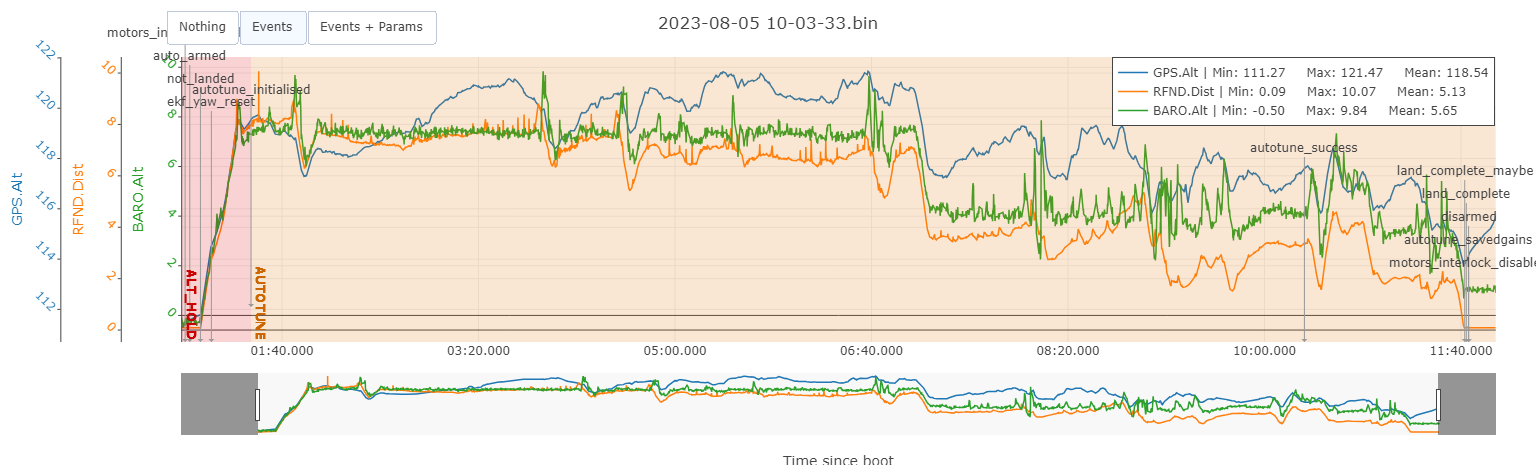
I wanted to redo and check if that was the problem of the telemetry that was causing that error. I figured out that my laptop was not working well for now during last mission and i was not having proper telemetry. This happened today too but when the laptop power ran too low. Was not able to remove the rangefinder and do the steps but i will do that tomorrow or on Monday with the proper weather here. but i have some updates. Today the reading are all positive just in the initial landing and takeoff are negative.
I think there is the drift in the barometer reading and also now it is different the log files. Now i see i have positive value during the flight and makes sense too but negative in the starting.
I could see the barometer drift but i think that is common with the sensor but is there anyway to remove that cause this might cause the problem for my application.