hi to all ,
i use qgc by pixhawk autopilot and fixed wing drone, i need some features:
1-trigger now command : by this command i can test camera before takeoff
2- display position of image taken in flight
2-wind direction display
4-mission distance or time estimation in loiter to alt mode : i use loiter to alt command for altitude change and it use battery , i need time or distance of loiter to compare by range of my drone.
For Stable build: Click the intrument page to change pages to the camera page.
For Daily build: Select Camera from the drop down.
Here is what it looks like in the Daily Builds.
That should already work. The Firmware must send the camera trigger notice though. I know it works for missions. Not sure if it works for just a single trigger command.
The is going to be somewher between really hard and next to impossible. The ground station doesn’t know the flight characteristics of the vehicle. Hence it won’t be able to do a very good job with loiter to alt.
Thanks donlakeflyer , ground station if can read parameters of turn radius , max roll angle , cruise speed and climb rate , by this parameters number and perimeter of circles can be calculated.
i have a further question . qgroundcontrol isn’t a 3d software but feature of elevation graph can help mapping at areas with elevation change, feature of elevation graph can be added to qgroundcontrol?
Use daily build for some terrain information. Just realizing I need to update daily build docs for this new feature:
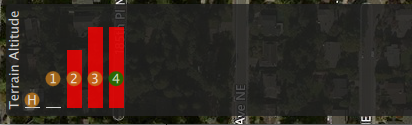
The Altitude display at the bottom of the Plan view now includes terrain data. The bars are white if you are ok, and red if you are going to hit ground. Just the first step in supporting terrain data.