I need help with configuring my flight controller Matek H743 Slim V3 and the H-RTK Mosaic-H (Dual Antenna Heading) system from Holybro. I am using the latest ArduPilot firmware 4.6 Dev and have followed all the setup recommendations provided on the Holybro documentation site, specifically the “Use as a Rover (Aircraft) Unit” section.
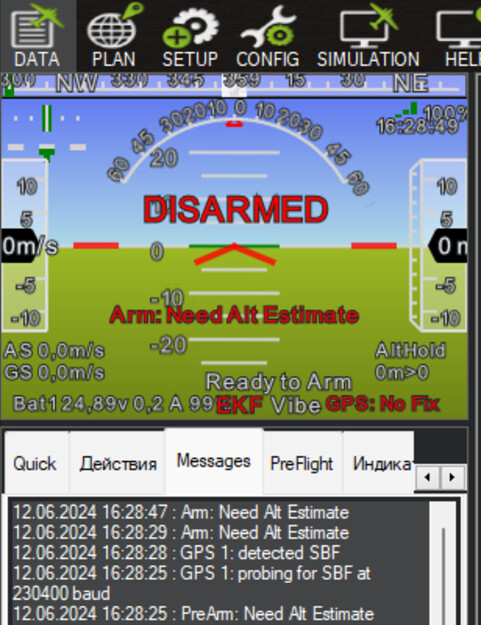
After applying the recommended settings, I encounter an error when attempting to arm the copter in any mode other than Stabilize:
I have experimented with different settings and found that this error occurs when the parameter EK3_SRC1_YAW is set to 2 (GPS), as suggested in the instructions. However, if I change the parameter EK3_SRC1_YAW to Compass, the error goes away.
My question is: how can I resolve the “Need Alt Estimate” error when the recommended parameter EK3_SRC1_YAW is set to 2 (GPS)? Are there any additional settings or configurations that I might have missed?
I have exactly the same problem.
I originally upgraded my drone to V5+ with a NEO 3 pro antenna connected to CAN and changed to a C-RTK 2HP, still connected to CAN.
On the old configuration everything went perfectly and since connecting the RTK following the CUAV installation instructions, I get a ‘need position estimate’ error if I’m in EK3_SRC1_YAW=2 or 3, but if I switch to EK3_SRC1_YAW=1 EK3_SRC2_YAW=2 or 3 the error is no longer displayed, but the drone is not clean in flight, which I think is linked to the fact that it only works on the internal components of the V5+.