My QuadCopter setup:
Quad, Pixhawk Clone (HW v2.4.6), MP v1.3.74 bld 1.3.756327684, Copter Legacy FW4.0.5, plastic props and plastic frame, Taranis X9D+ TX, Taranis X8R RX (SBUS from RX to Pixhawk clone).
A couple of people have mentioned that one of my motors is no in the same alignment as the others. Looking at the Quadcopter it is not obvious which motor is out of alignment. Two .bin files are available https://drive.google.com/drive/u/0/folders/1oJu4VgNgmyL_zD6jq1j20pBN_rVmGqK6
and a screen shoot from the 6dec2020 flt. (see attached)
Can anyone suggest a means to specifically identify which motor is not in alignment?
You X and Y vibrations are nice and low, but Z vibrations are high. Check for loose wiring, things vibrating against the flight controller.
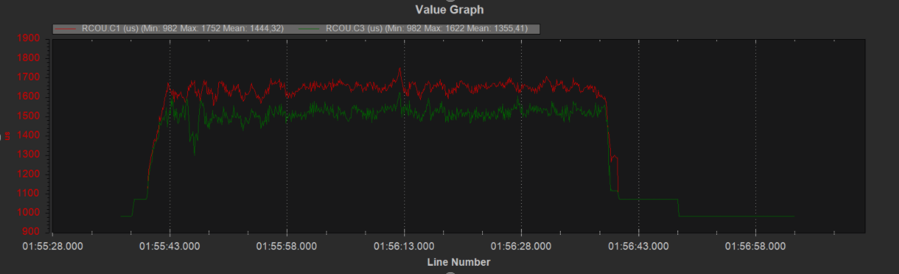
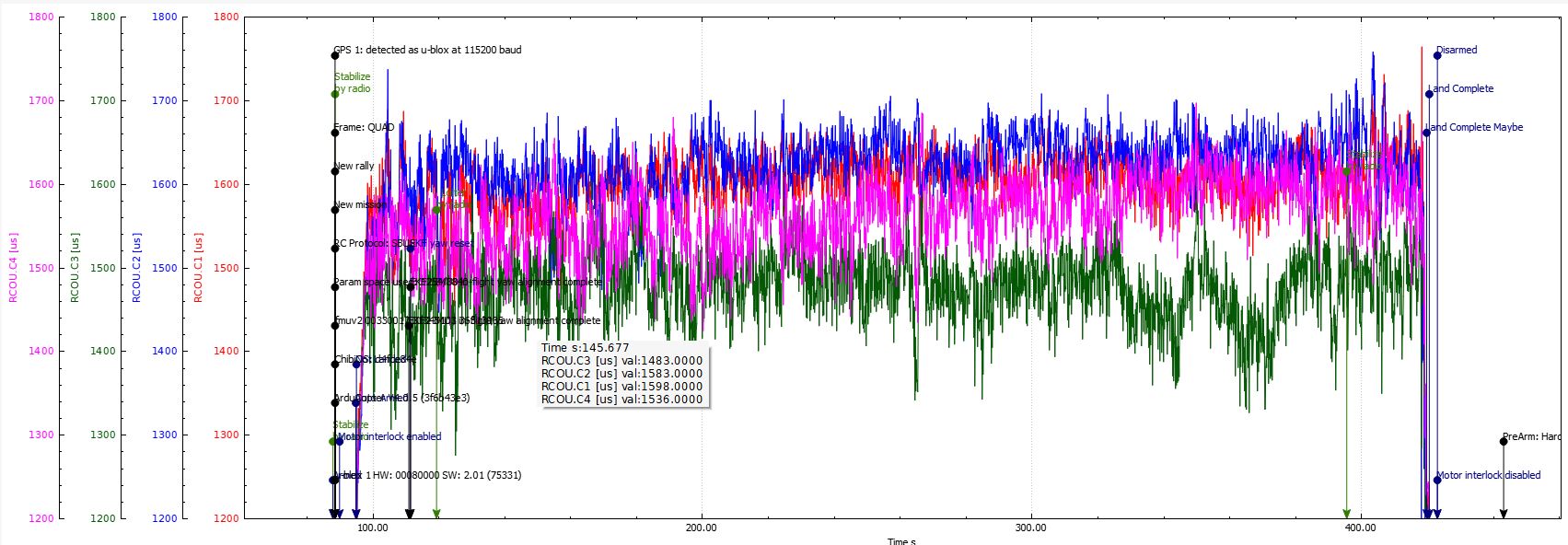
Motors 1, 2 and 4 are all about even, but working harder than motor 3. This indicates more of a weight imbalance away from motor 3. Either that or it’s prop or motor is different to the others. Or the ESC is not calibrated the same.
Maybe run the all-at-once ESC calibration to be sure, then inspect the props and motors anyway. https://ardupilot.org/copter/docs/esc-calibration.html
Visually - all the props should be spinning on exactly the same plane. Good eyes, and maybe a straight-edge too -> carefully check all prop tips point to the next prop tip. Use a straight-edge across each motor mount and see if it is tilted relative to the whole frame.