So I am starting to do the config for this tail sitter and running into a few issues.
I will list them here and any input would be appreciated.
The ESC telemetry reports the voltage as about 5 vdc higher then it should be. I imagine there is a BLHeli adjustment that can be made but not sure.
I tried the ESC calibration using the process when using Q_ESC_CAL=2.
I don’t think this is working because I see motors spin up at different times.
3,I notice that once I get a GPS lock and I arm the bird…on the bench props off. The horizon suddenly flips and the fc starts screaming bloody murder. I suspect I have a config issue here. It’s unclear to me if I do an Accel calibration with it sitting on its tail or as if in level flight.
Also I am not sure if the AHRS_Orientation needs to be different since it is a tail sitter.
Later that same day, lol
I am binning the ESC as I continuously have issues with it reporting that ESC 1 isn’t activated. Had enough of that non sense, so the circular filing cabinet for it.
I also noticed that Q_TAILSIT_ENABLE wasn’t set right so I corrected that but there has been no change to the machines behaviour.
Ok I think I am getting closer.
I reread the documentation and confirmed I had done the Accel calibration correctly.
However I missed the fact that you need to do the boot up in level flight orientation. I had not done that so I have now.
I then noticed the horizon was correct in a Q mode and wrong in FBWA if sitting on it’s tail. This I believe is the normal behaviour…so I think I am good there.
I did notice that the horizon still flips after a few seconds but noticed the machine is going into RTL while sitting on it’s tail. Thats plane mode so the horizon would be messed up. Why it’s not doing a Qrtl when it’s sitting on it’s tail I don’t know.
It’s clear that the HackRC 4in1 esc isn’t working right. One motor hesitates to start and the telemetry voltage is 3 volts high. Also I can’t access one esc via BLHeli as it says it’s not activted or it’s unknown. So me thinks it’s getting tossed.
What I would like to do is confirm some config if I can.
I have set Q_TAILSIT_ENABLE,2 which is for no control surfaces. So I think thats right.
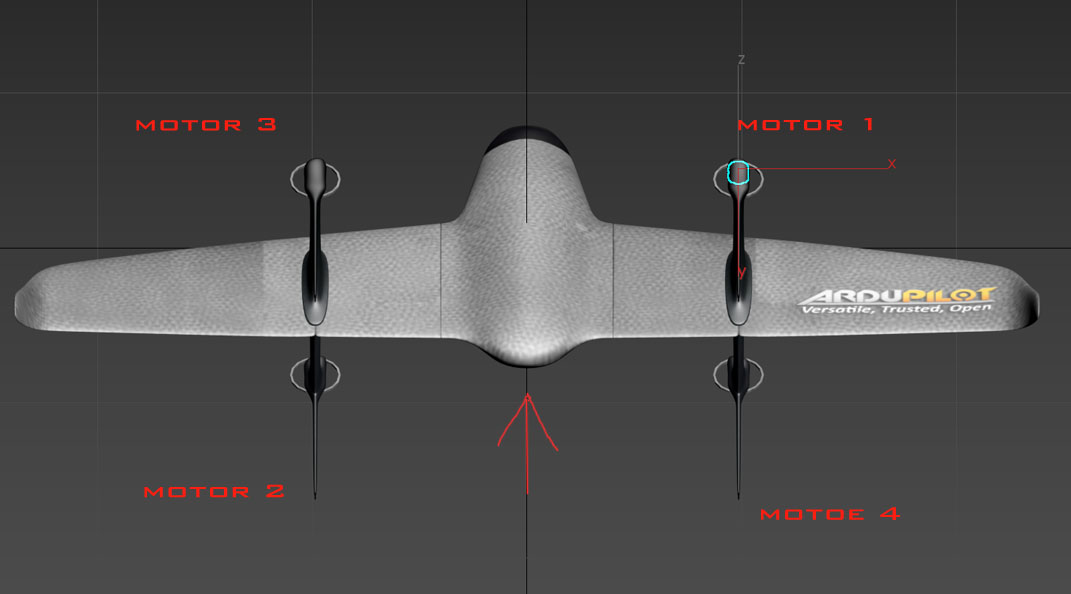
I have set Q_TAILSIT_MOTMX,15 which is the first 4 motors…so I think thats right.
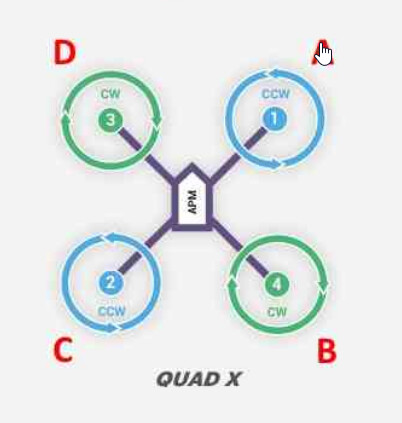
I have set Q_FRAME_TYPE,16 which is for this type of motor orientation.
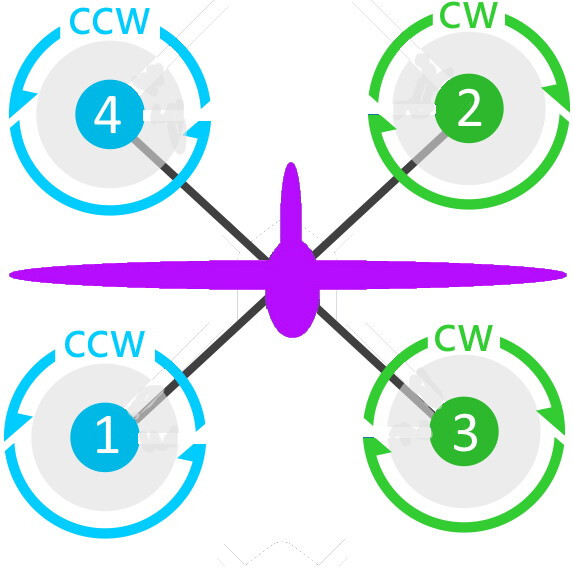
I know this is the motor test relationship for a quad. I assume it’s the same for the NYT QUAD X Motor Tailsitter if so then my motor order is wrong and I need to correct that.
Nomaly no need to cal if your using Dshot just a reboot and arm will do the trick. however go to esc cal and set the dshot from normal to 600. you will hear the esc make a noise when armed.
Hey Thanks Brandon.
I think my ESC is fubar. Its not starting right. I agree calibration isn’t normally needed, but I was trying to determine what was wrong with the ESC…so will try the Dshot 600 but if no joy I am tossing it.
What I am not sure about is motor order.
Thats got me a bit confused.
hey dude what param file is this. You gave me one the other week, it was FoxHwing01.param.
Is this different.
Also I discovered the Dshot wasn’t set so I will correct that and test some more.
Also what is that new file. I tried to open it and it appears to be an HTML file.