@xfacta @Eosbandi sorry for the delay, was involved with some other tasks
So I have autotuned my 5" quadcopter running arducopter 4.0.4, these are params i set before autotuning:
ACRO_YAW_P,3.5
ATC_THR_MIX_MAN,0.1
ATC_ACCEL_P_MAX,165300
ATC_ACCEL_R_MAX,165300
ATC_ACCEL_Y_MAX,31500
ATC_RAT_PIT_FLTD,37.5
ATC_RAT_PIT_FLTT,37.5
ATC_RAT_PIT_FLTE,0
ATC_RAT_RLL_FLTD,37.5
ATC_RAT_RLL_FLTT,37.5
ATC_RAT_RLL_FLTE,0
ATC_RAT_YAW_FLTD,0
ATC_RAT_YAW_FLTT,37.5
ATC_RAT_YAW_FLTE,2
MOT_THST_EXPO,0.55
MOT_THST_HOVER,0.2
INS_ACCEL_FILTER,20
INS_GYRO_FILTER,75
MOT_BAT_VOLT_MAX,8.4
MOT_BAT_VOLT_MIN,6.6
After autotuning in all roll,pitch and yaw axes these are some params:
ATC_ANG_PIT_P,18
ATC_ANG_RLL_P,18
ATC_ANG_YAW_P,6.686522
ATC_RAT_PIT_D,0.008305321
ATC_RAT_RLL_D,0.007172775
AUTOTUNE_MIN_D,0.001
These are the PIDs after autotuning:

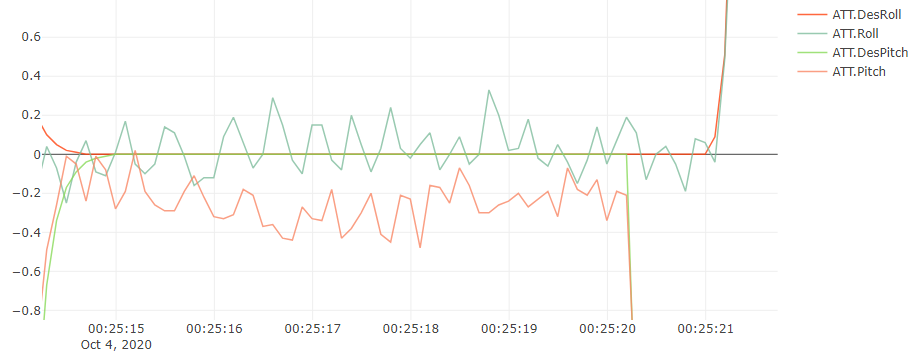
After looking at autotuning guide, these values suggest that autotune has been successfully completed, what you think about the tuning on this quadcopter ?
Log and complete parameter list is attached below, this is the log of flight after finishing autotuning:
5" quad log