firmware - arducopter v4.1.0 - dev
build - omnibusf4pro, Here+ RTK GPS, 5" props quadcopter, 350 grams weight
Issue:
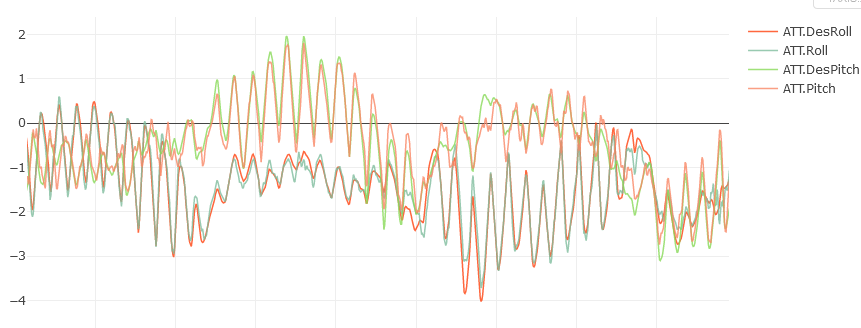
So i have autotuned my drone, its flying well and seems very stable, only problem i am facing now that there is rare problem of toilet bowl, i am flying multiple drones with similar build and tuning setup, though this issue happen rarely but can be observed in all the drones time to time. Even auto-analysis not able to catch magnetic interference issues/warning, i am only using external compass of RTK GPS, and i have even done compass/motor calibration using throttle, still i am stuck with this issue.
Please kindly have a look at my log and parameters of one drone where this issue repeat again recently if i am missing anything which i am not able to observe from log, its been a month now that i am still stuck with it. It’s becoming a major problem now to keep going forward with this issue as i cannot keep drones in close proximity.
Please let me know if actual pictures of drone can probably help in diagnosing the issue, i will share them here.