Hi guys,
I am with a heli project using Trex 450L air frame and Matek 743 Slim FC unit. I have no prior experience with Ardupilot or Matek FC units. I am facing difficulty mapping the servo outputs on FC unit and need your guidance. My setup details are as below:
Radio: Futaba T16SZ (16 channel)
Receiver: Futaba R7008SB, connect using SBus.
ECS: CC Phoenix EDGE50
FC: Mateksys H743 Slim + PDB: F722-PX-W
Arudupilot: V4.0.7
Mission Planner : V1.3.75
-
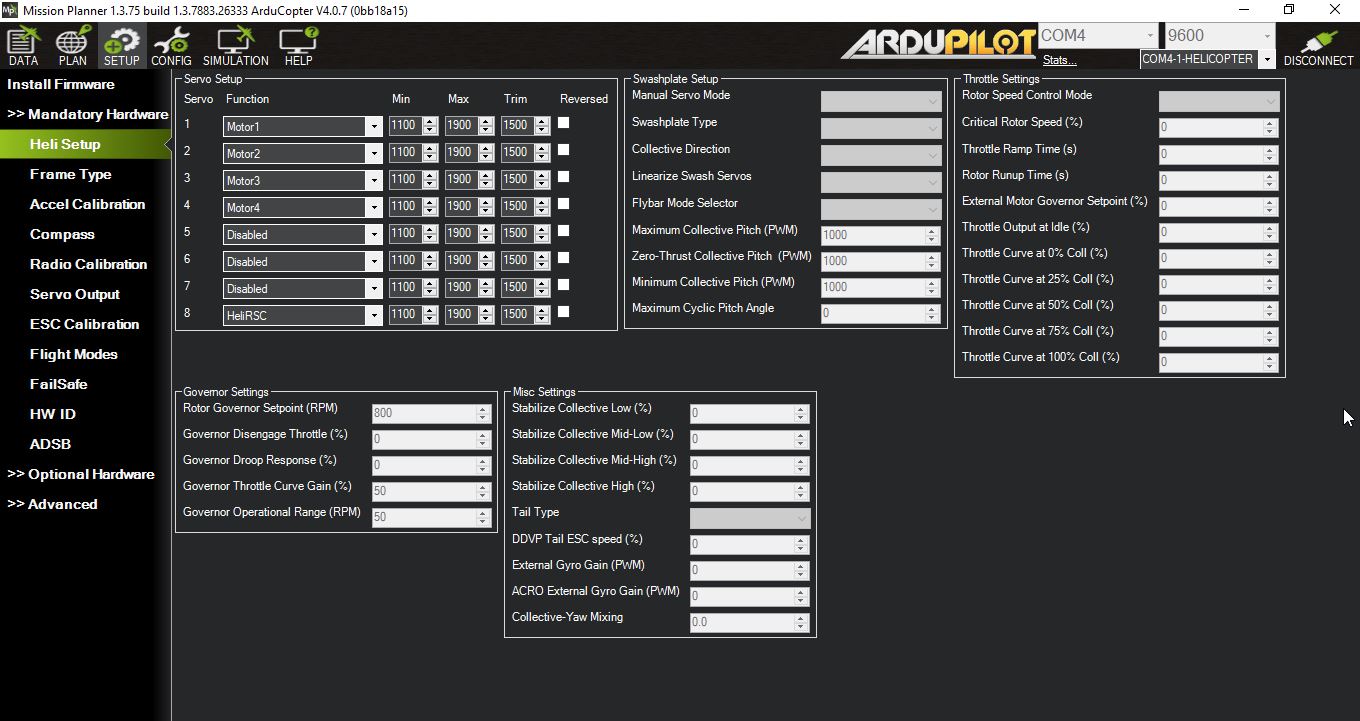
I would like to know how to program the ROLL, YAW, THROTTLE and PITCH outputs. I had programmed the servo 1, 2, 3, and 4 as motor 1 (33), motor 2 (34), 3 motor (34) and motor 4 (36) as per Ardupilot document. I assume the four servo outputs on the PDB should be S3, S4, S5 and S6. However, none of the servos are working on S3-S6 pins.
-
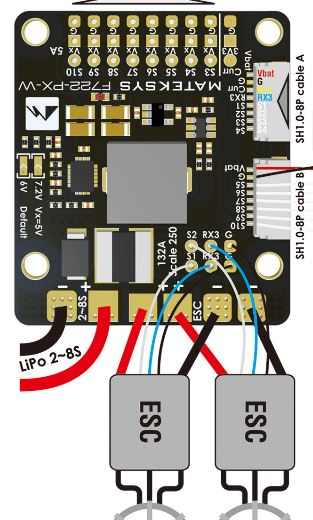
Where to connect the ESC connection?
As per Matek PDB layout diagram ESC connection is on S1 and S2 which is for BLHeli32 compatible ESC. My CC Phoenix EDGE50 is an ordinary ESC that I wish to connect S7 or S8. Is that possible?
Parameters_H743_450L.param (20.0 KB)
Any help would be highly appreciated
Thank you,
Amal