The Heli set up page in mission planner is outdated and requires updating the reference parameters to align with parameter changes with Arducopter 4.0. Any help would be greatly appreciated.
1 Like
Indeed, MissionPlanner’s Heli interface has been ineffective for a long time, and I really hope that the developer will fix the page as soon as possible. Otherwise, for the first time contact, all the functions are set in all parameter tables, which is a huge difficulty!
Is it just Parm names that have changed?
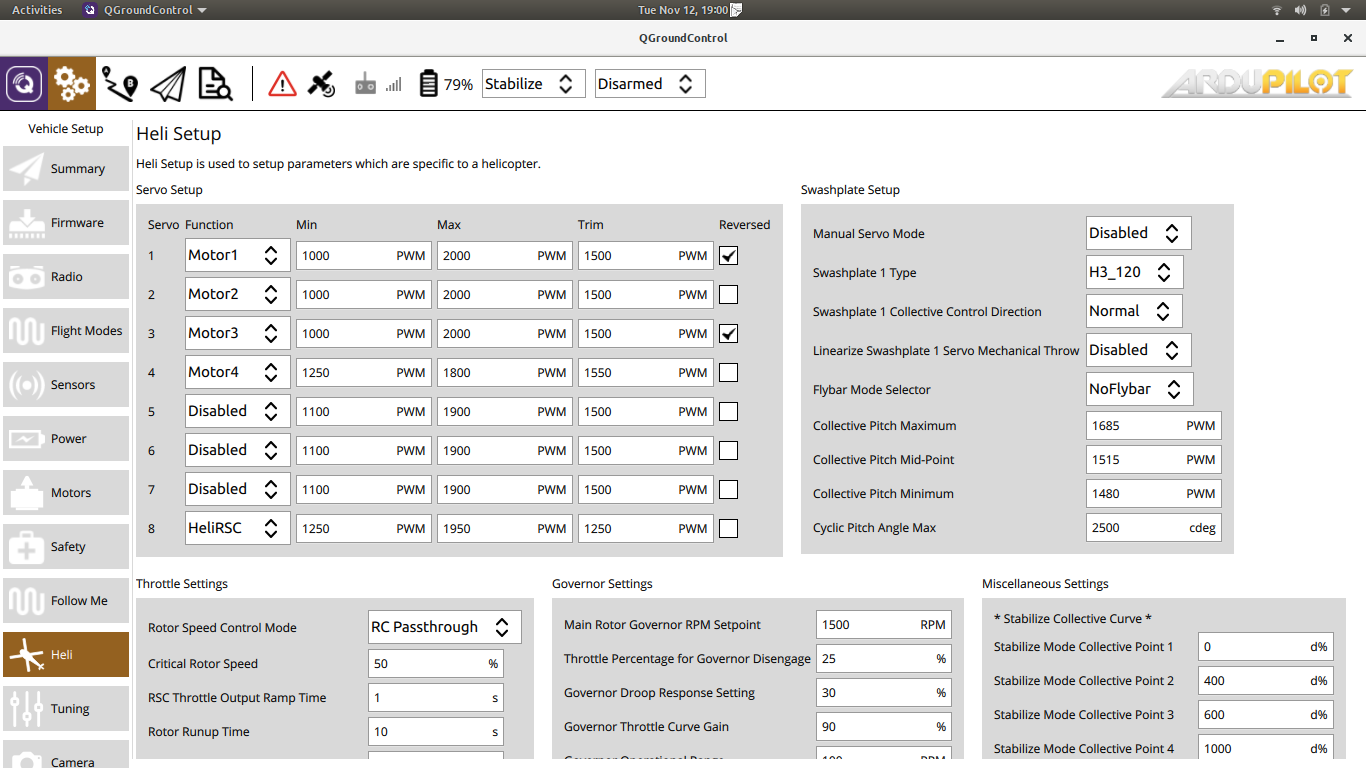
Easiest is to show what I put in QGC, maybe Bill has some other things.
- We list the functions and settings for the first 8 servos
- Swashplate library is new - servo positions no longer displayed - supports four-servo swashplates
- Collective direction is now reversible (for HR3 swashplates and heli’s that use combination swash drive/pitch washout arms) - this was available in Copter 3.6
- We are able to linearize servo output for four-servo swashplates
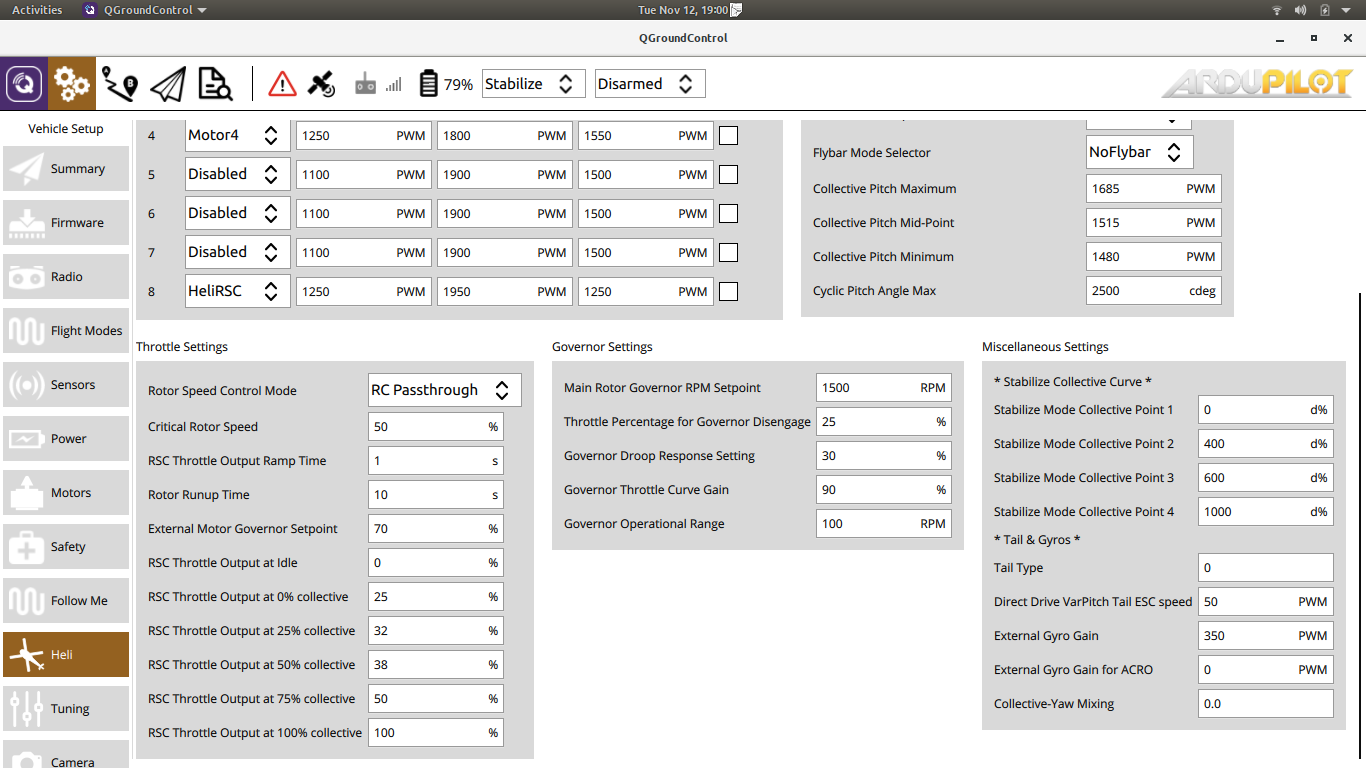
Screen scrolled down:
- We now have 5-point throttle curve instead of 3-point, this came out in Copter 3.6
- We have an internal governor, which is new in 4.0
I put a version lockout in QGC because the 4.0 heli setup is not compatible with Copter 3.6, so the heli setup will not display in QGC Daily Build unless the Copter version is 4.0 or newer. QGC 3.5.x supports Copter 3.6 heli setup and is not compatible with 4.0
Bill had asked for a Tandem Helicopter setup. I may add that with a separate page that will show based on frame class and firmware version. We need to determine if there is enough users flying Tandems to make the time spent on that worthwhile, or have them go to the full parameter list. All the settings on the current setup page apply to tandems, but there is some additional swashplate settings because they have two rotors and swashplates, DCP scalars, and other additional settings as compared to a single-rotor machine (load frame class 11).
Perhaps Bill has some other things that I forgot in this list.
1 Like