Hi,
i do suspect one issue there, but, if it could be possible for somebody to peek and identify a most probable cause of the reason of why it did it - it would help me a lot.
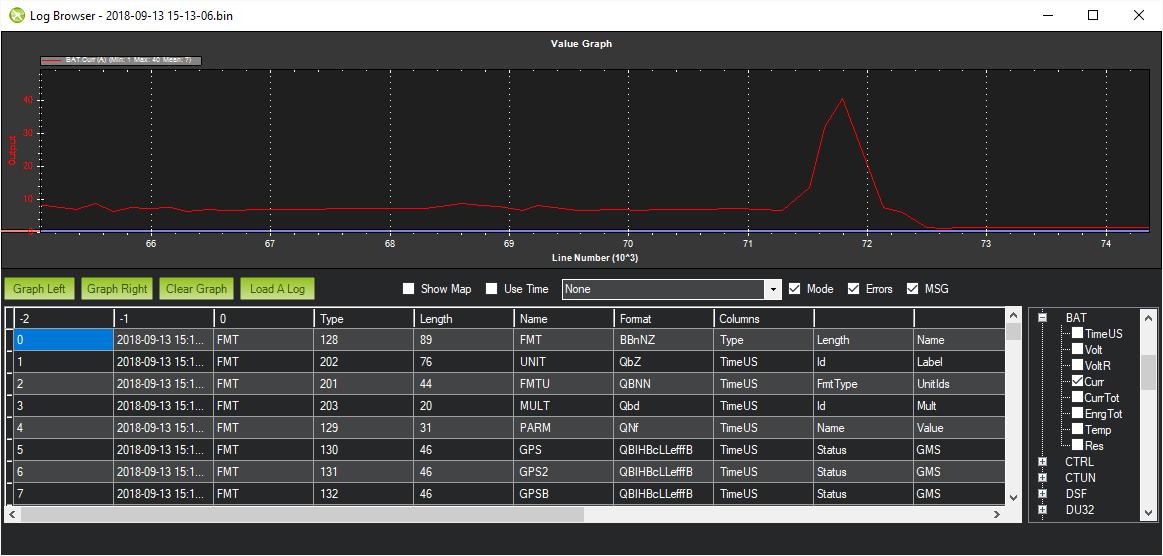
it was just a test in alt hold mode, response from model was a bit nervous - then it suddenly did a roll to the right when i killed its motors.
screenshot of the current shows when it was done - in between marks 71 and 72. vibrations 3.3 chart shows all lines under mark ‘6’ - so it is not that. what was it?
it happened on more than 1 flight, so the issue is definitely repeatable. i just need to understand if it is hardware or software/settings stuff.
https://drive.google.com/file/d/1GEG9DZ35tO8yFzubGMvGOAyecACTUNjN/view?usp=sharing
here is an another sample - it looks like it is reacting fine when it is moved around with sticks, but if left alone it goes into a resonance and flips? here it flipped over left roll. i did not expect such stuff with pids used there - so just need to understand if it is driven by incorrect pids or anything else.
https://drive.google.com/file/d/1qGCM_linrI4qWFBnXwfNBcQ5t5HgDa3P/view?usp=sharing
if anybody could advice just from looking at logs - what to do with pids in there, it would be great… it does look like most of all pids related issue - similar to what i had on the slightly bigger 250mm model - this one is 200mm and it looks like any roll input it does - is just WAY too much. i tried to set it to stock initial pids - it is not flyable this way, too much bounce and bad control. i reduced P roll and pitch from 18 to 10 - did not help much. autotune attempts to start but mid-way crashes, and oscillates like no tomorrow.
looking at partially finished autotune results it gave quite an odd data but i tried it and it worked - model now sits more or less stable in the alt hold mode.
i also set both INS gyro and acc filters to 80hz. then, set both ROLL and PITCH _D to 0.001. and, set their _P to 0.03. and _I to 0.03.
half finished autotune had ATC_RAT_RLL_P actually even lower - at 0.027, considering that a default ‘mnimal’ value for it is 0.05. go figure.
will try to do a proper autotune tomorrow, i need to do it in a safe place if it will decide to flip and dart sideways again - it is no joke with this rooster frame when it does it…