I am having a hard time understanding and setting up notch filtering. These graphs confuse me. Do I need to filter? Not too sure where to start. I have read through the wiki a number of times.
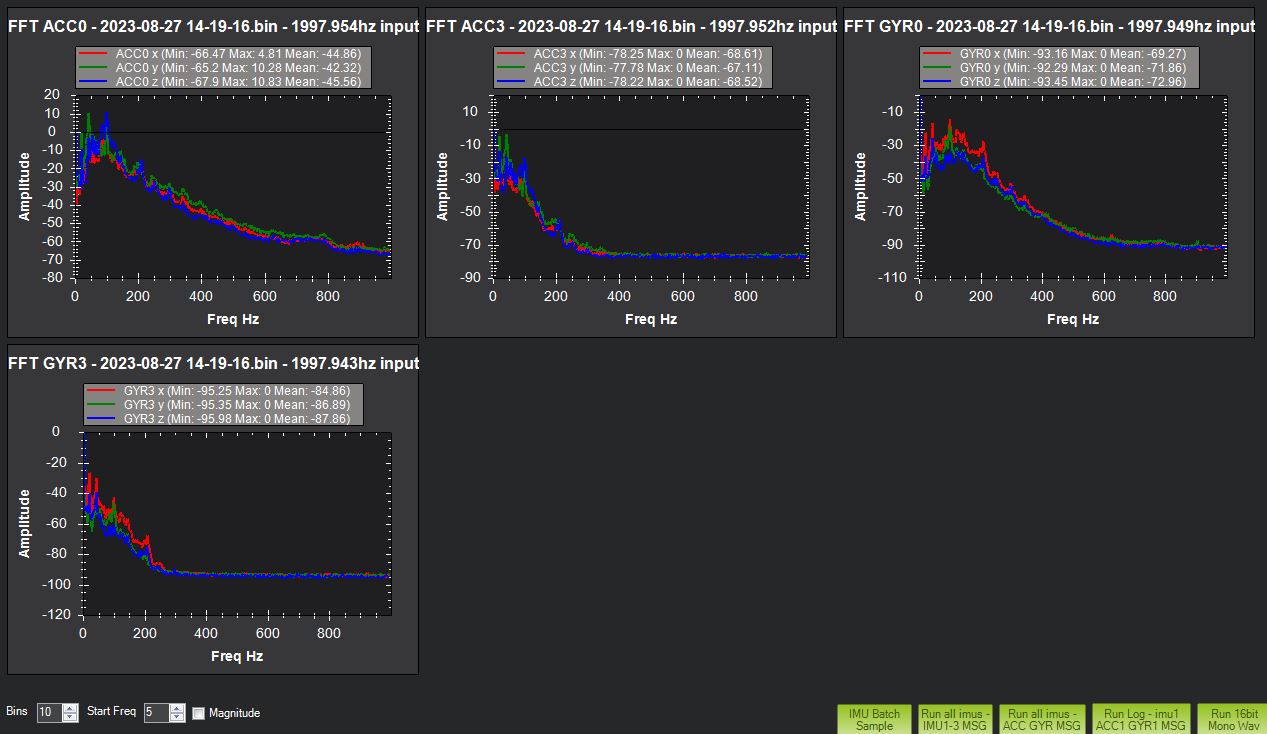
Select “Magnitude” at bottom left before loading the log file.
Gyro0 is the pre-filter data, and Gyro3 is the post-filter data. Ignore the ACC charts.
EDIT:
In that log you’ve got an awful lot of noise spread over many frequencies. Is this actually flying?
Provide a few more details about the aircraft too.
Thanks for the selecting magnitude tip it makes a lot more sense now.
“Is this actually flying” lol Yes, it is flying. Hover in ground effect.
I think I will go over the heli and see if I can clean up the vibration mechanically before proceeding with filtering. What amplitude is acceptable for the graph you have generated also did you plot it in Mission Planer
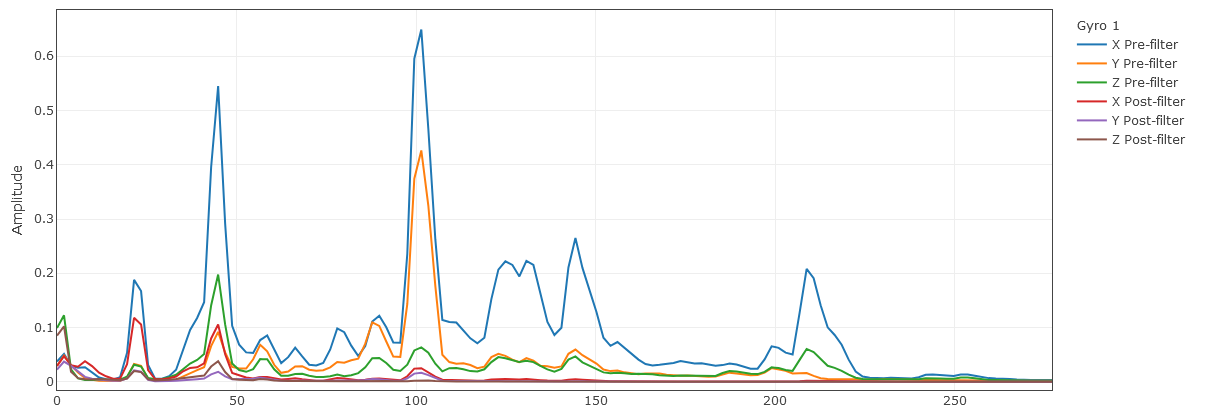
Where is the vibration at 50 and 100 Hz? likely to be coming from?
Thanks for the help.
@HeliRick A good bit of those peaks are due to the rotor. There is the once per revolution (1/rev) peak which means it is at the rotor speed. Looks like yours is 25 hz or 1500 RPM. Then you will have multiples of the number of blades. so if you have a 2 bladed rotor system then you will have a peak at 50 hz (2 blades * rotor speed) and 100 hz(2 * 2blades * rotor speed). We use the notch filters to clean up the signals for the control system.
I hardly ever look at the FFT since heli’s vibrations are at multiples of the rotor speed and the rotor speed is typically kept pretty constant. How are you controlling rotor speed? are you using an ESC with a governor or are you using the internal ardupilot governor? If you have a RPM sensor, that also helps. So as long as the rotor speed is kept constant, then just set the static harmonic notch to the rotor speed and use a 5 to 10 hz bandwidth. if you have a 2 bladed rotor system then set up the harmonics for 1, 2 and 4.
The default value of INS_GYRO_FILTER at 20 hz will take care any noise beyond the 4th harmonic.
So this just handles the noise in the control system. You’ll want to check your Vibes in the VIBE message and ensure they are below 10. If they are then you’ve done a good job on your mechanical setup (FC mounting and blade track and balance).
Hopefully you have been looking at the tradheli wiki
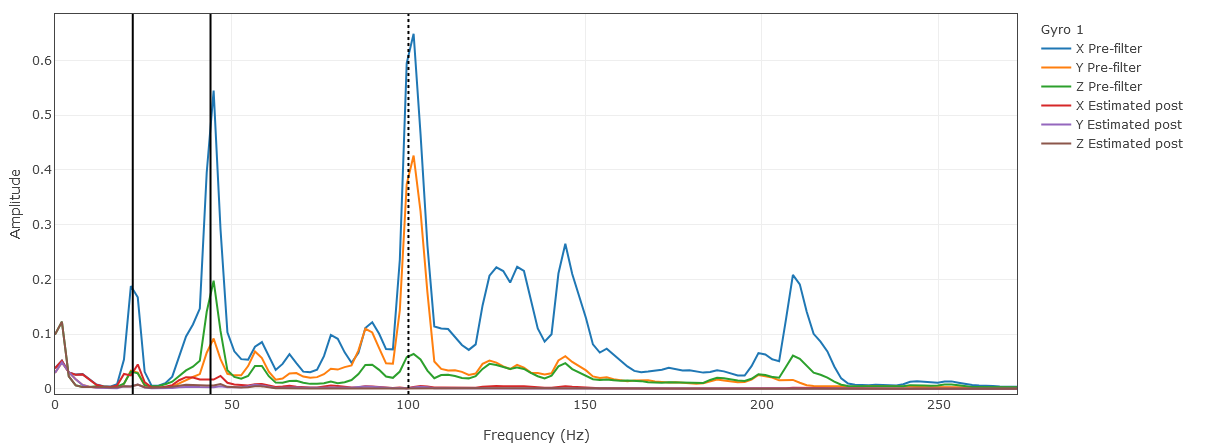
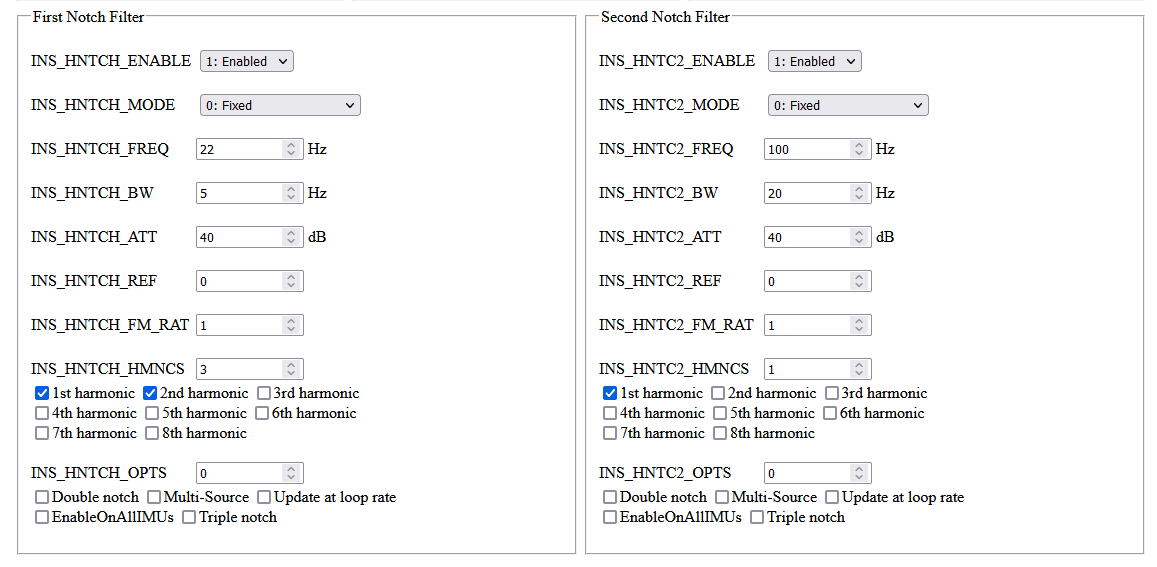
Depending on what Bill would agree to or say what was correct, these two static notches may work:
I’m not sure about the effectiveness of a throttle-based harmonic notch with a heli. I’d be more confident if you had RPM data.
I defer to Bills vast knowledge in all things heli.
Shawn,
I guess I didn’t look closely enough at the plots. Thanks for pointing out that the 100 hz peak isn’t quite a harmonic of the lower two peaks. The 100 hz peak could be the tail rotor but it is odd that it has that large of a roll component. I would expect the pitch because an unbalanced tailrotor will cause pitch vibration. So your setup would work
Don’t use a throttle based harmonic notch. It is misleading because it really isn’t throttle for heli that the harmonic notch follows. It is designed for Multi’s because it follows the throttle stick (which is collective for heli’s). So keep with what Shawn has shown for the mode (fixed). Unless you have an RPM sensor, then you can use that notch mode.
Looks like I have some work to do. Thanks for the help. Been super helpful. Will report back how I got on.
Regards
Rick