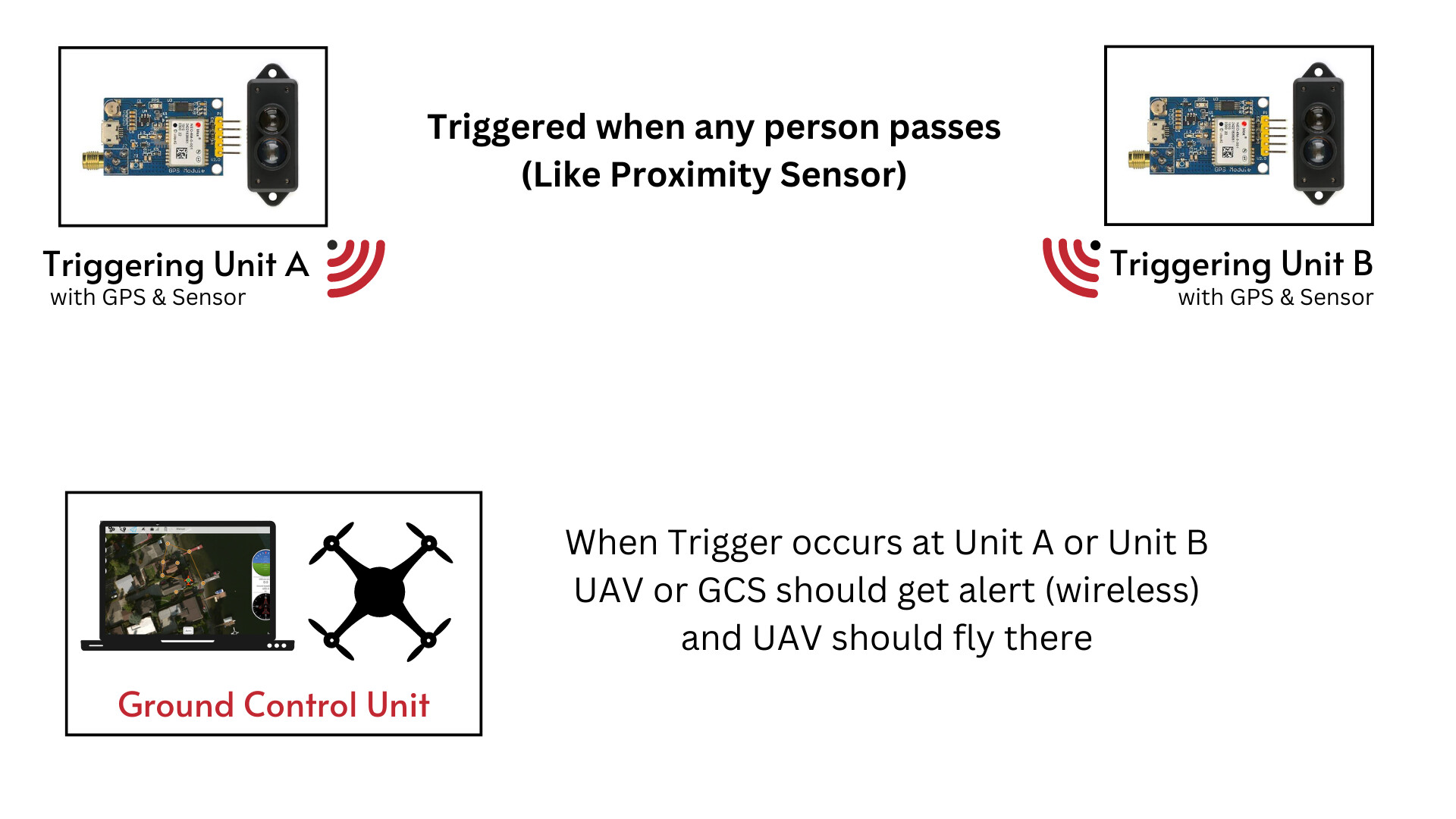
Here is the scenario that describes basic concept (ALSO DESCRIBED IN IMAGE)
There will be some proximity sensors in field area.
If any things passes that sensor it will triggered and UAV has to automatically fly and hover at that place (that lat long) for some time and then RTL.
Where currently i am stuck ?
I have idea about field side that how it will and send data to any other device
but i have no idea how to intergrate this with GCS / Pixhawk
You could build a set of predefined missions for each of the waypoints observation and get them uploaded and flown automatically using Mission Planner Python Scripting upon detection.
Here is a very old video that I presented in the 2019 ArduPilot unconference in Camberra:
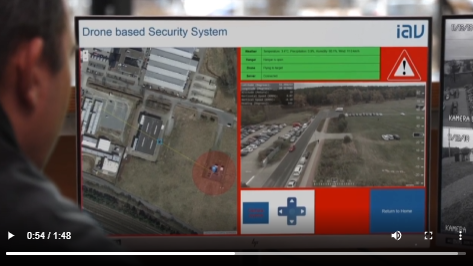
Here is a video of the production system in action, fully automated, no human intervention whatsoever (except for the thief )
The system used 3 companion computers all managed by ansible, and a modified ArduCopter branch with improved precision landing for night flights. It uses around 100 run-time ROS diagnostics to assert the system´s health at all times. Some of the changes we already contributed back to mavros, mavlink, rosmon, multimaster_fkie and ardupilot. AFAIK all the gimbal improvements we did, have now been done as well by Randy in master.
Thanks…
I see that IAV video demo is very similar to what actually we are trying to do
I was upto Dronekit (as things are quite simple in it). What is your opinion about that using it.
Or may be we can jump into pymavlink after studying all mavlink docs.
+ Just wondering about programming language used in your GCS type GUI (that is seen in IAV demo you shared ). I have made a quite simpler version of that in pyhton
Seems like a nice idea that can work for us.
But How can we switch between different Pre-defined missions (eg. Mission A , Mission B or Mission C )
Like If there is mission A (that will have Lat Long of Triggering Unit A )
and now we want to upload a mission B (when Unit B triggers)without human involvement
@Reksin
What you can do is to use a raspberry Pi with Dronekit and mavproxy installed and then write a script in python for whatever task you need to perform.