I try to run Arducopter SITL simulation with Gazebo with khancyr’s ardupilot_gazebo repo. When adding a link with 1.57 radian pitch to models/iris_with_ardupilot/model.sdf using this diff:
3a4,39
> <link name='imu'>
> <pose> 0 0 0.1 0 1.57 0</pose> <!--big pitch or roll trigger this problem-->
> <inertial>
> <mass>0.0001</mass>
> <inertia> <!-- inertias are tricky to compute -->
> <!-- http://gazebosim.org/tutorials?tut=inertia&cat=build_robot -->
> <ixx>0.000083</ixx> <!-- for a box: ixx = 0.083 * mass * (y*y + z*z) -->
> <ixy>0.0</ixy> <!-- for a box: ixy = 0 -->
> <ixz>0.0</ixz> <!-- for a box: ixz = 0 -->
> <iyy>0.000083</iyy> <!-- for a box: iyy = 0.083 * mass * (x*x + z*z) -->
> <iyz>0.0</iyz> <!-- for a box: iyz = 0 -->
> <izz>0.000083</izz> <!-- for a box: izz = 0.083 * mass * (x*x + y*y) -->
> </inertia>
> </inertial>
> <collision name="collision">
> <geometry>
> <box>
> <size>0.01 0.01 0.01</size>
> </box>
> </geometry>
> </collision>
> <visual name="visual">
> <geometry>
> <box>
> <size>0.01 0.01 0.01</size>
> </box>
> </geometry>
> </visual>
> <gravity>true</gravity>
> </link>
>
> <joint name="imu_joint" type="fixed">
> <parent>iris::base_link</parent>
> <child>imu</child>
> </joint>
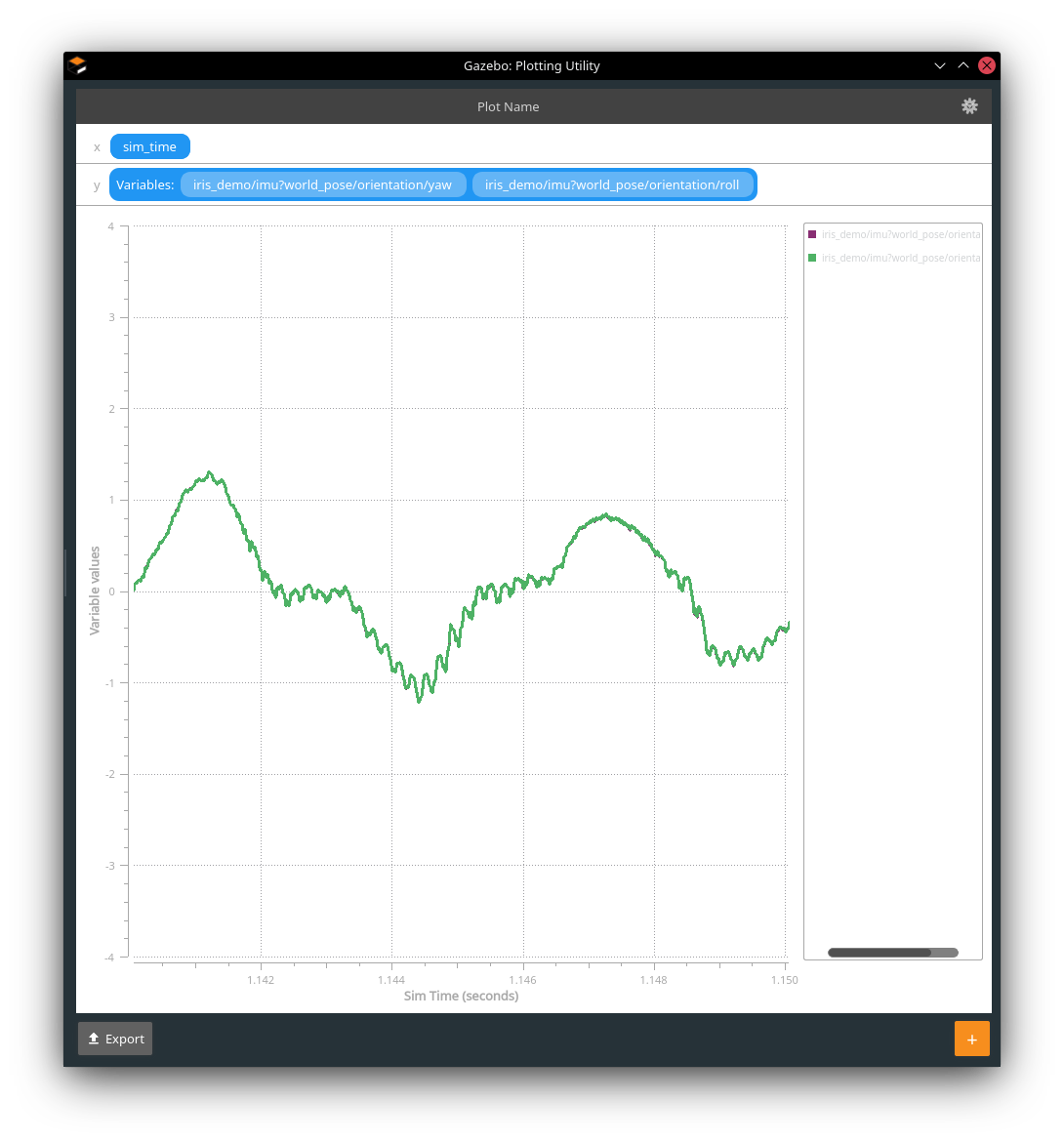
The gazebo orientation internal reading of that imu link become random eventhough the copter is perfectly still while hovering in mid air( mode guided, arm throttle, and takeoff 5). Below is the gazebo internal plot of yaw and roll of that imu link. As you can see, yaw and roll assume identical random value.
This problem is gone when using zero orientation for imu link such as <pose> 0 0 0.1 0 0 0</pose>. Can anybody confirm this?
Background story:
I need to attach a Ouster LiDAR model link that equipped with IMU to my copter. That LiDAR must facing downward hence 1.57 radian pitch. But the IMU plugin is using Gazebo’s internal orientation and showing weird random value. At first I thought this is the plugin problem, but when plotting the orientation with Gazebo own plot, I realized this is Gazebo problem.