So it got into RTL while indoors and without GPS lock…that’s odd. i still think GS shouldn’t be dependent on AS although i’m speaking on physical terms not what the code is doing. maybe someone else can shed some light here.
That WP is either your home position or a rally point you might have set up. but if you have never got a GPS lock before MP should have no home point position data. odd.
odd indeed it is. it may be due to some latest alterations done in 4.0.3 master. who knows.
i will try to get to the bottom of it, if time permits.
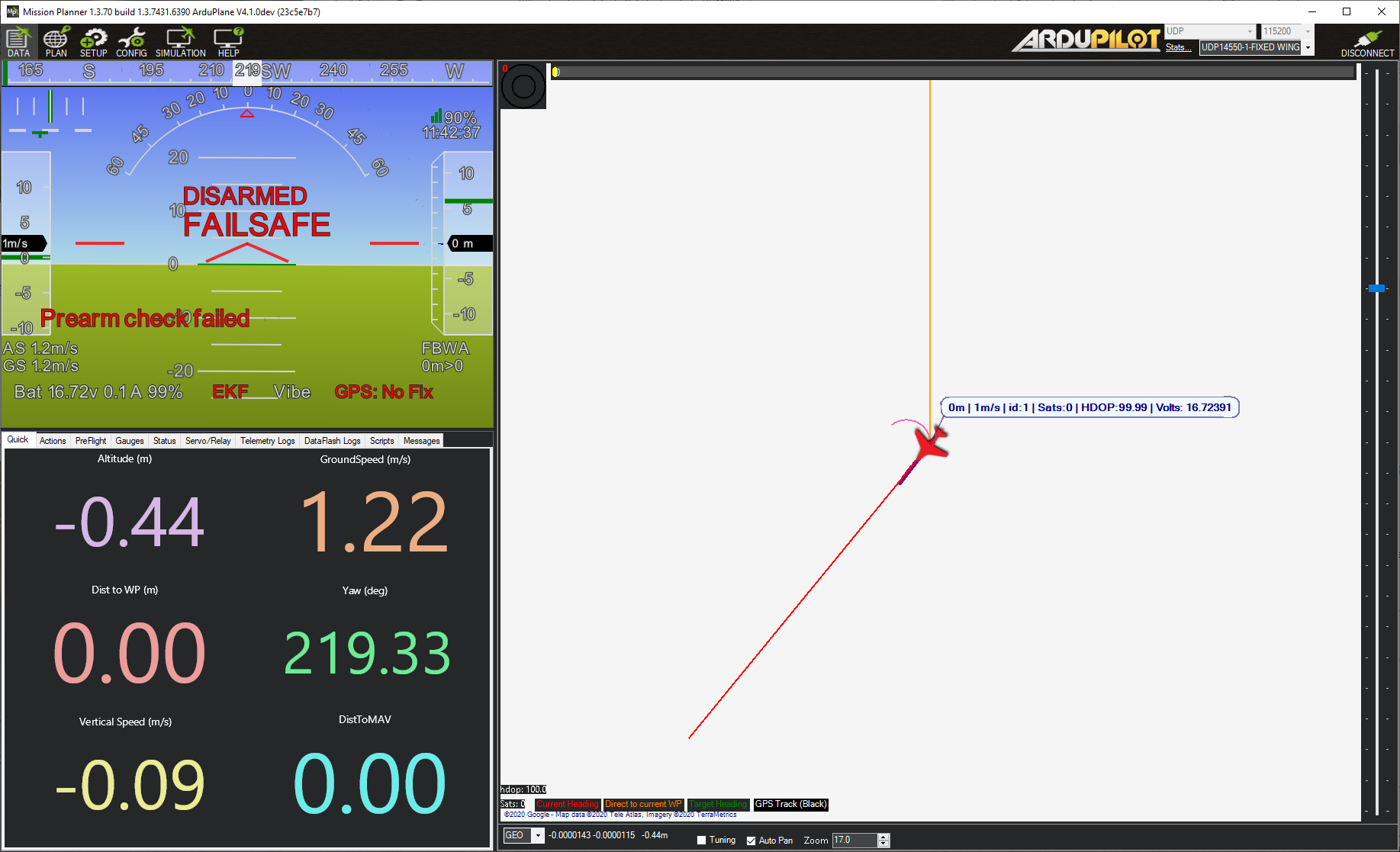
again, the core issue is not the erratic RTL driven issue, but a total inability to arm afterwards as EKF locks down with an imaginary deviation from an imaginary WP vector.
5/8/2020 11:42:46 AM : Flight mode = 11
5/8/2020 11:42:46 AM : Failsafe. Long event on: type=2/reason=3
5/8/2020 11:42:37 AM : Airspeed 1 calibrated
5/8/2020 11:42:35 AM : Flight mode = 5
5/8/2020 11:42:35 AM : Failsafe. Short event on: type=1/reason=3
5/8/2020 11:42:35 AM : Throttle failsafe on
5/8/2020 11:42:35 AM : GPS 1: detected as u-blox at 115200 baud
5/8/2020 11:42:35 AM : Ground start complete
5/8/2020 11:42:35 AM : Airspeed calibration started
5/8/2020 11:42:35 AM : Barometer 1 calibration complete
5/8/2020 11:42:34 AM : Calibrating barometer
5/8/2020 11:42:34 AM : INS: alloc 6144 bytes for ISB (free=342584)
5/8/2020 11:42:33 AM : Beginning INS calibration. Do not move plane
5/8/2020 11:42:33 AM : Ground start
5/8/2020 11:41:46 AM : u-blox 1 HW: 00080000 SW: EXT CORE 3.01 (107900)
5/8/2020 11:41:44 AM : GPS: u-blox 1 saving config
5/8/2020 11:41:40 AM : RCOut: PWM:1-2 DS600:3-4 PWM:5-12
5/8/2020 11:41:40 AM : ChibiOS: cbb955d4
5/8/2020 11:41:40 AM : SonicModell 00340023 32375112 32373836
5/8/2020 11:41:40 AM : ArduPlane V4.1.0dev (23c5e7b7)
5/8/2020 11:41:40 AM : Flight mode = 11
5/8/2020 11:41:40 AM : Failsafe. Long event on: type=2/reason=3
5/8/2020 11:41:32 AM : Airspeed 1 calibrated
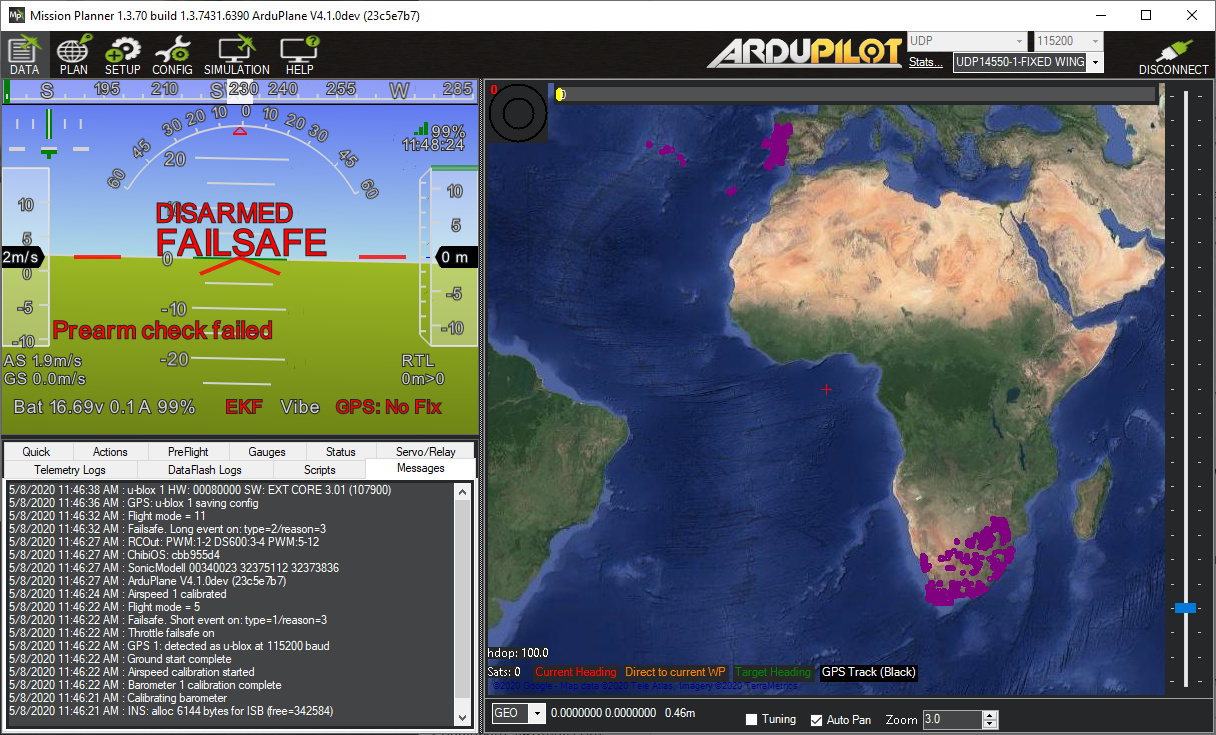
I do not know. some BS is happening - as i see same messages when it has no use for airspeed set, but, it does not make that orange vector in that scenario, yet, if prints all the same mode changes messages - as below.
go figure.
/8/2020 11:46:38 AM : u-blox 1 HW: 00080000 SW: EXT CORE 3.01 (107900)
5/8/2020 11:46:36 AM : GPS: u-blox 1 saving config
5/8/2020 11:46:32 AM : Flight mode = 11
5/8/2020 11:46:32 AM : Failsafe. Long event on: type=2/reason=3
5/8/2020 11:46:27 AM : RCOut: PWM:1-2 DS600:3-4 PWM:5-12
5/8/2020 11:46:27 AM : ChibiOS: cbb955d4
5/8/2020 11:46:27 AM : SonicModell 00340023 32375112 32373836
5/8/2020 11:46:27 AM : ArduPlane V4.1.0dev (23c5e7b7)
5/8/2020 11:46:24 AM : Airspeed 1 calibrated
5/8/2020 11:46:22 AM : Flight mode = 5
5/8/2020 11:46:22 AM : Failsafe. Short event on: type=1/reason=3
5/8/2020 11:46:22 AM : Throttle failsafe on
5/8/2020 11:46:22 AM : GPS 1: detected as u-blox at 115200 baud
5/8/2020 11:46:22 AM : Ground start complete
5/8/2020 11:46:22 AM : Airspeed calibration started
5/8/2020 11:46:22 AM : Barometer 1 calibration complete
5/8/2020 11:46:21 AM : Calibrating barometer
5/8/2020 11:46:21 AM : INS: alloc 6144 bytes for ISB (free=342584)
Yet - as can be seen - in the ‘normal’ scenario GS is not reflecting AS, and there is no icon of the plane with active vectors. And horizon does not jump like crazy - in the first shot it shows that horizon is way off - it was moving for 20-30 seconds with elevator reflecting that.
an i get EKF inconsistency message now every damn time. not sure what i did last night to get rid of it, i cannot replicate it anymore
i just got model outside - with tube sticking out and seemingly almost no wind i got 10m/s speed indicated in mission planner, so, i suspect something is needed to be set differently for that sensor.
it autocalibrates for me during startup consistently into the ARSPD_OFFSET values from 203 to 210. dunno what else may be relevant. perhaps an actual flight is needed to confirm what it should be set to, to match factual speed with a measured air speed.
also, ekff inconsistency message went away, seems like, after EKF got a full correct GPS 3D lock and activated mode GPS fully.
i am confused with this, to be honest, as i did not expect at all EKF initialization to wait for GPS mode for planes. i need to look more at it. even with drones the full GPS lock mode for EKF init is pending ONLY if you activate flight mode dependent upon GPS - like position hold. Alt hold, stabilize, manual modes are not to be expected to be GPS dependent. I was setting default plane mode to ‘manual’ every time. not sure what gives, will need to look at it later again after work.
imho most of the issues you’re seeing are due to testing without your EKF fully settled and aligned due to insuffiecient GPS fix, plus having GPS arming checks ticked off. EKF requires sufficient GPS fix to set origin independently of the flight mode you’re in.
i’d suggest to:
- set arming checks back to default 1 (all)
- set LOG_DISARMED = 1
- test with good GPS fix conditions only (outside, unobstructed sky view)
- post log if you’re still having issues
glad it cleared up the alerts. 10m/s seems excessive. to make sure it’s not a hardware issue, have you blocked the total pressure inlet and ‘do’ a preflight calibration? also is it fluctuating or stuck at 10?
if you can fly safely without airspeed-dependent features such as autothrottle in FBWB or stall prevention, then by all means do a few circuits, land back, and take a look at the log.
i will need to look again, it was always fluctuating. my concern was about the boundaries of that fluctuation and if the setup was done correctly for that type of the sensor. so far i do not see any mistakes, but, who knows. with ‘use’ param at 0 i can see the airspeed on the taranis, so, for that alone i think it is enough.
model is now 98% complete - my 14 yr old son works on it with me, so, it takes a bit longer  but it is the most fun i had so far. hope it will actually fly well after all we did to it. this is a sonic modell binary, with retractable gear, runcam micro, matek f765, gps - did not put lidar on it yet.
but it is the most fun i had so far. hope it will actually fly well after all we did to it. this is a sonic modell binary, with retractable gear, runcam micro, matek f765, gps - did not put lidar on it yet.
hi, did you find anything interesting, if you were able to test it?
Hey sorry not yet. Can you ping me again on Wednesday. I got busy buying some new hardware.
Just finished this baby

 meanwhile i spent hours trying to arrange the electronics inside my trainer and add printed fairings to reduce drag…
meanwhile i spent hours trying to arrange the electronics inside my trainer and add printed fairings to reduce drag…
