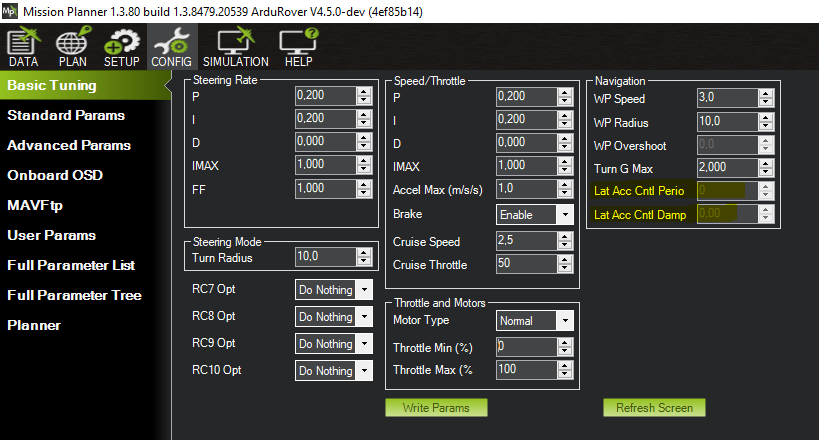
I’ve set up my FC for Simulation on Hardware, to be able to see how my home built steering servo behaves during auto missions (will eventually be installed on a raft). However I don’t think the steering signal is aggressive enough during Auto, so I was looking to change NAVL1_PERIOD. But the param is missing in Mission Planner. “Lat Acc Cntl Perio” is greyed out and set to 0 under Basic Tuning and I don’t get any matches when searching for NAVL1_PERIOD in the Full Parameter List.
Checking the Complete parameter list docs for Rover, it doesn’t appear there either. Has it been removed and replaced by something else?
My goal here is just to get my servo to turn more during the simulation. I realize I will have to perform some real tuning once installed in the real vehicle.
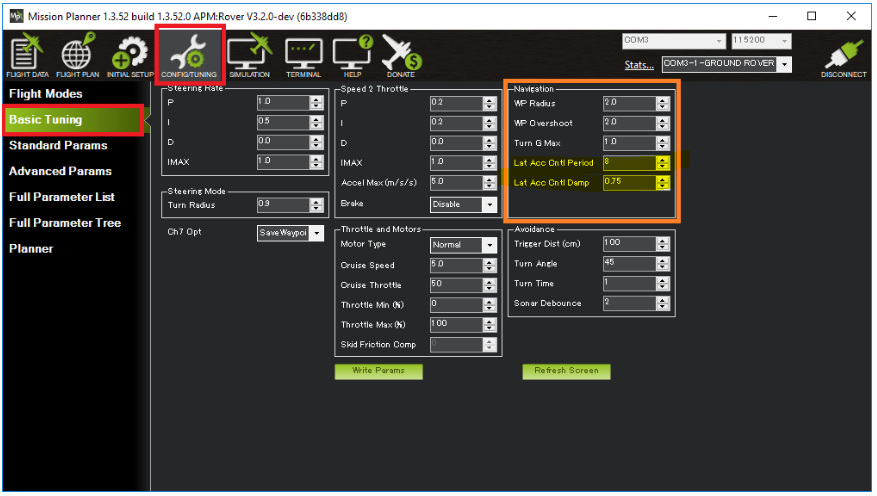
Thanks for the link. In the tuning wiki for 4.3+ you can see that there are “Lat Acc Cntl Period” and “Lat Acc Cntl Damp” in one of the pictures (see snippet from wiki below)
Which is really what I was confused about. But I can also see that there are no references to those settings in the text, but they’re still in the “4.2 and lower” section. So perhaps the same screenshot was just re-used. https://ardupilot.org/rover/docs/rover-tuning-navigation-420.html
I’ll surely follow the tuning guide for my real craft, but for now I’m just playing around in the hardware simulator, and wanted to find a way to exercise my servo more than it did with the default settings.
Hi,
I got the same issue. Navigation was fine with old version where it was following strickt to the line, but now it just drive to the next point. Settings of lat acc cntl perio is disabled?