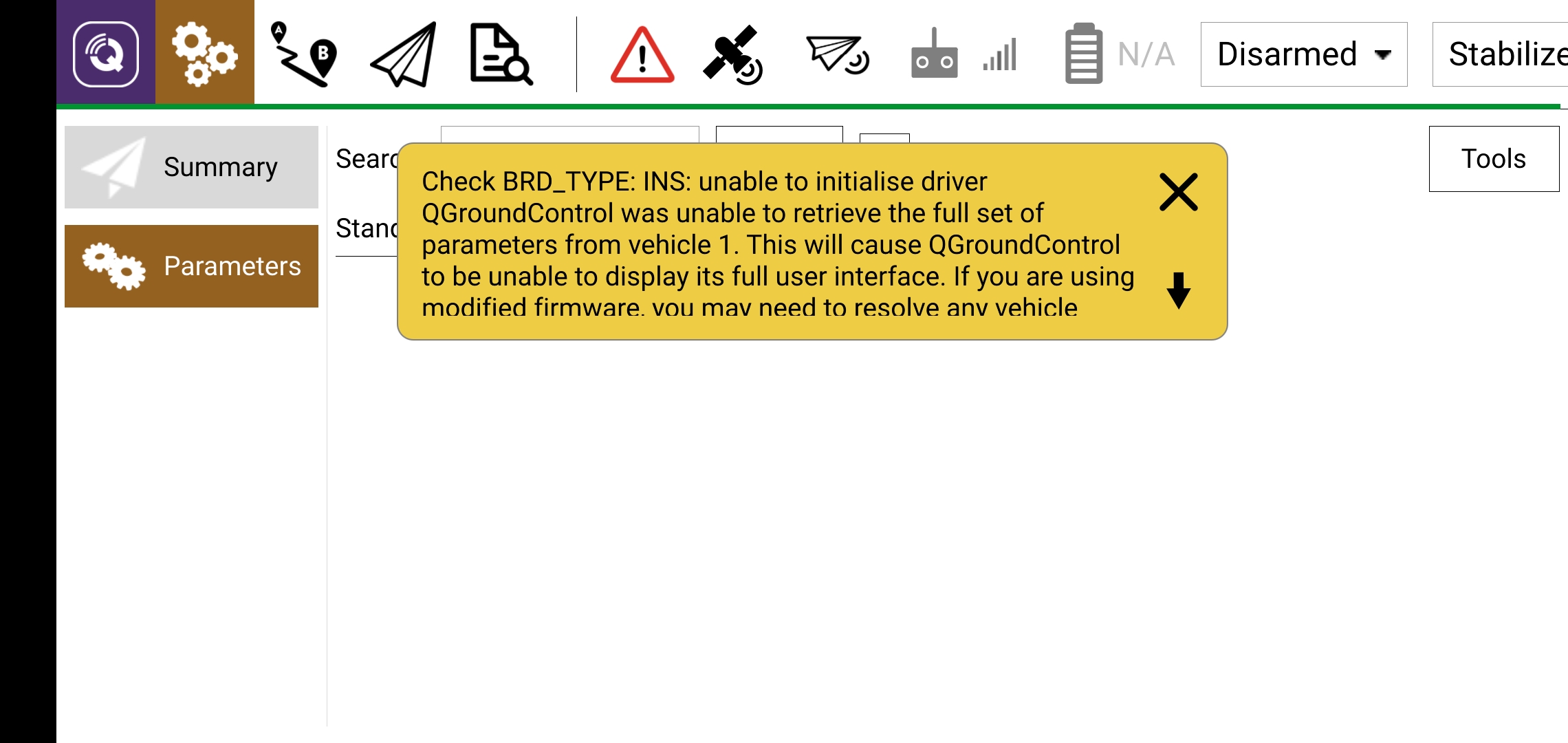
I can’t find where BRD_Type parameter is and even if I found it, I wouldn’t know how to make it work for my navio2 board.
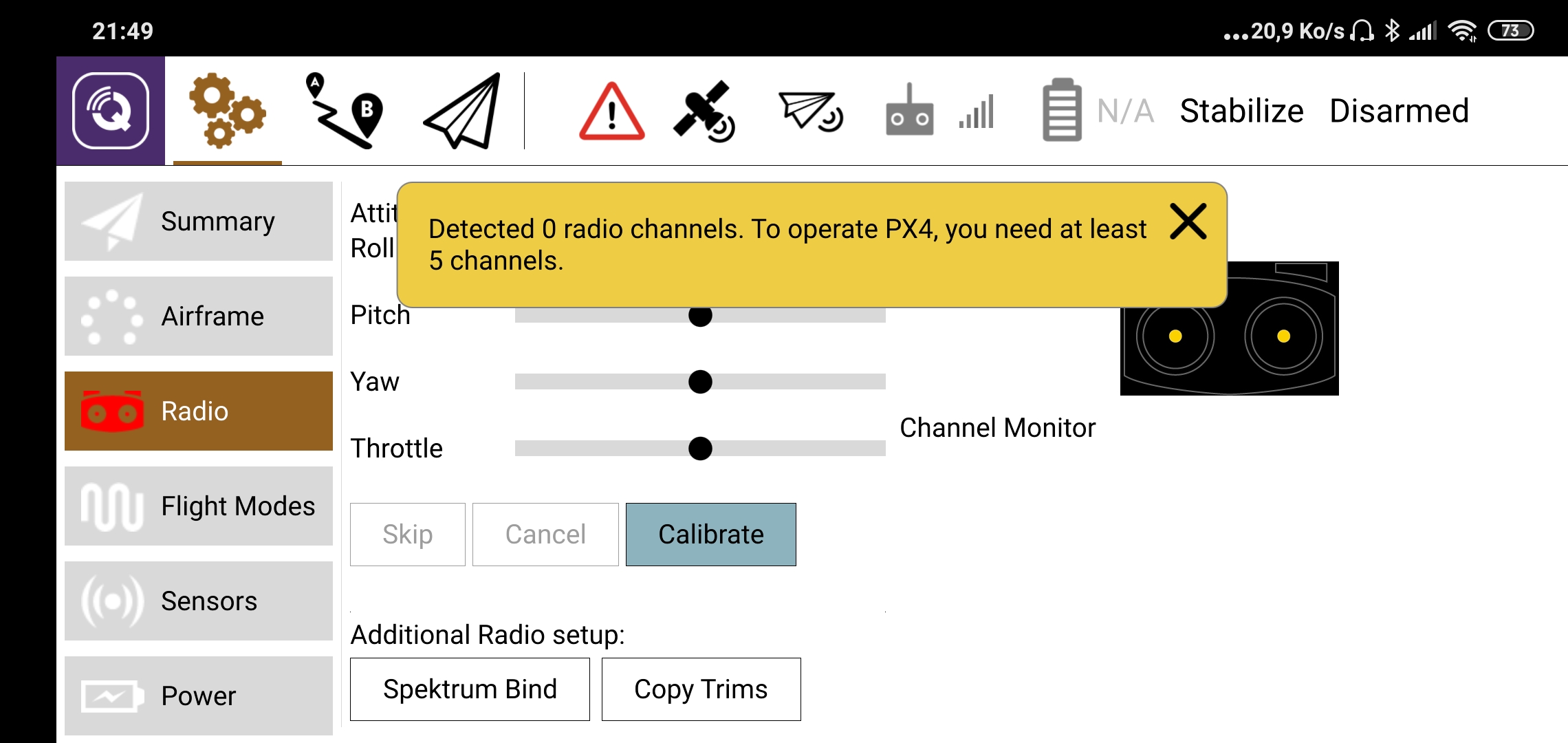
2. I think that is a result, but when I try to calibrate my controler there is a message telling me "Detected 0 radio channels. To operate PX4, you need at least 5 channels"
Since you are using navio2, the message is actually wrong since Linux boards don’t use the BRD_Type parameter. It should be left as Auto if you see it.
I recommend updating to master branch and trying to check if it’s working. Chances are you have a faulty navio2 or it’s not tightly connected to the rpi.
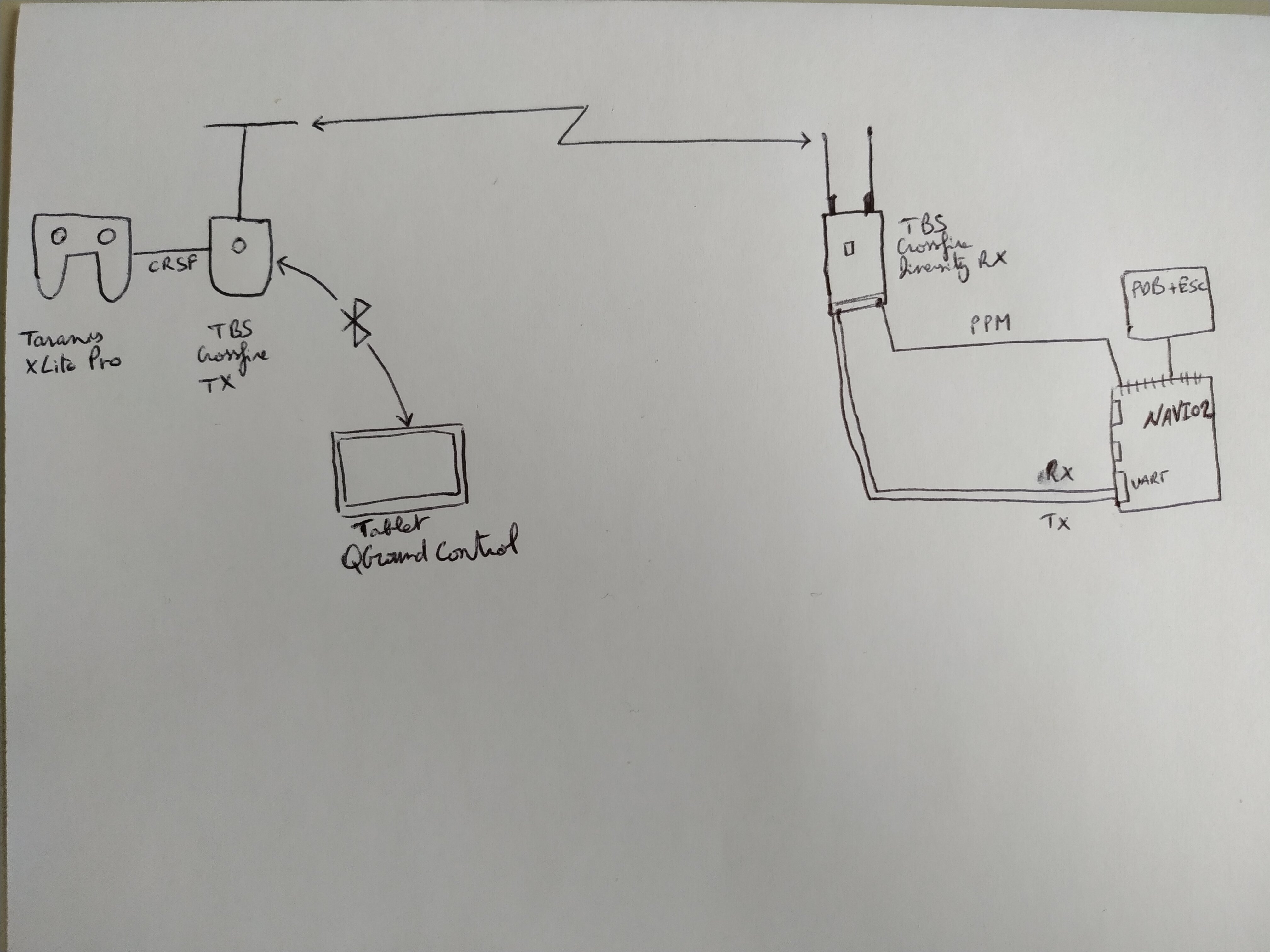
I think it could have something have to do with the radio link. The BRD_TYPE should be zero and that works fine on my Navio2. But maybe try connecting with regular telemetry radios on either /dev/ttyAMA0 or /dev/ttyUSB0 (depending on the connector type on your radio) first and do the setup with that. And using a regular SBus RC receiver too.
Then try to get the TBS Crossfire working after you have everything configured and known working. It doesn’t look to me like the Navio2 is even detecting any RC channels thru the Crossfire link and I have had problems with this with both Crossfire and DragonLink in the past. Especially the DragonLink is very buggy on Bluetooth. It’s been awhile since I played with Crossfire.