I have just returned from a 8 day project doing a survey on a very scenic Loskop Dam here in South Africa with an area of 6,000 Acres using two FishTec AIMy’s (USV’s) which covered over 1,000km.
Unfortunately only one of them did 90% of the work while the other one enjoyed a week of making ‘Crop Circles’. Both boats were fully tested days before the trip and everything was perfect.
My question is: What do I look for in my log in order to determine the root cause of this failure?
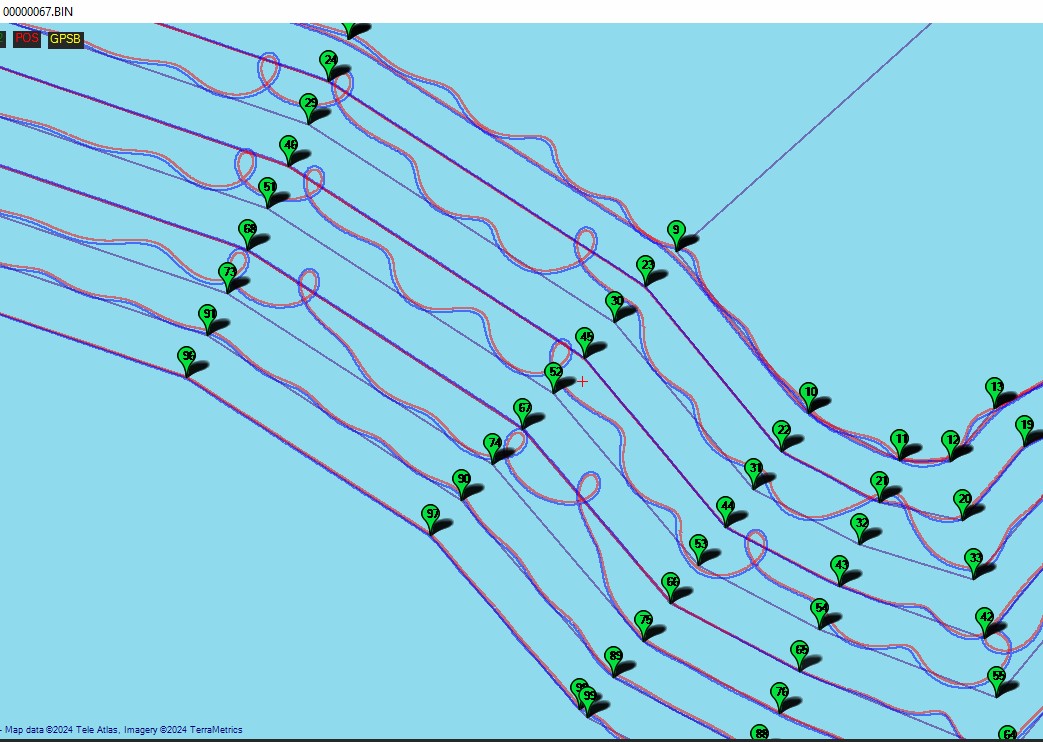
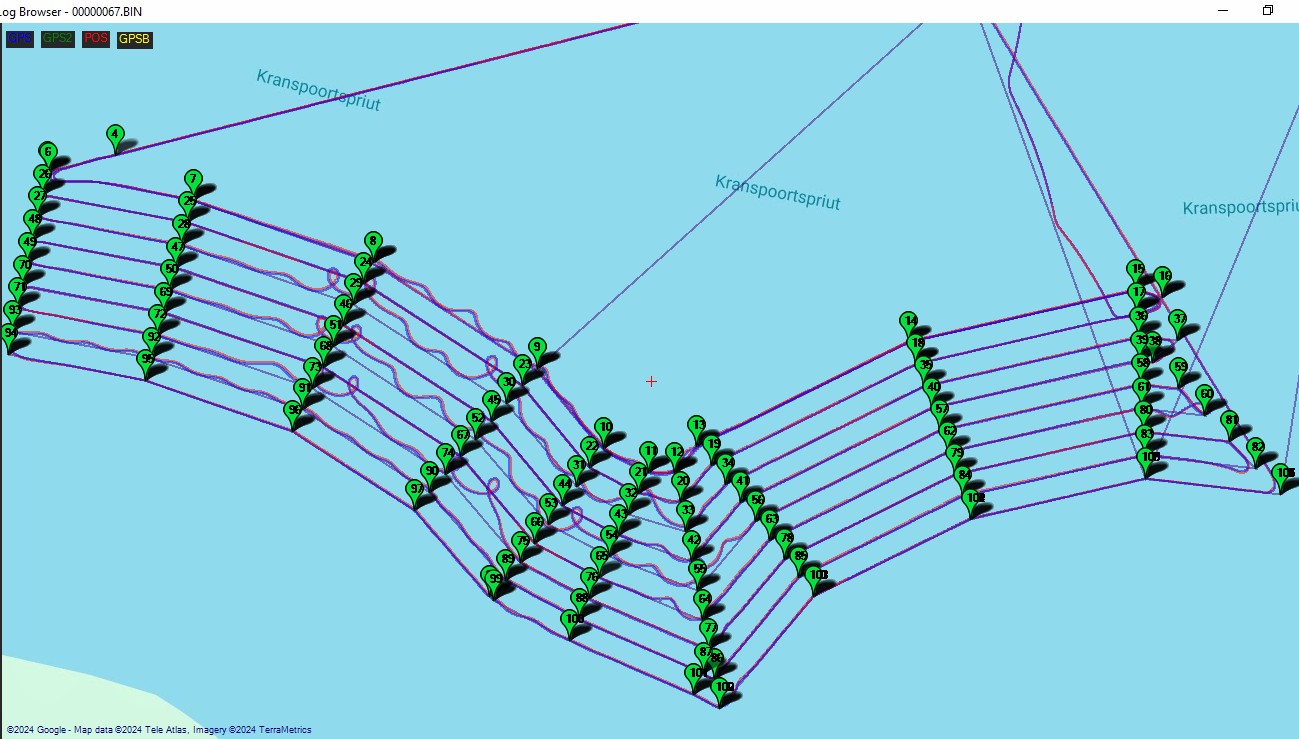
I have looked at the steering logs and she is doing exactly what the controller is telling her to do as you can see from the images. So what is failing on the controller to cause this catastrophic phenomenon?
As you can see the east side is perfect with the odd west side pass also perfect, but mostly, the west side is a disaster.
Saw this the other day and meant to take a look. I’ll admit I haven’t looked at the log, but a sudden major divergence from the norm like this usually speaks to a mechanical issue. Have you ruled that out?
It could be your seeing what we would call “toilet bowling” on a copter.
I also notice you have a large GPS position offset, nearly 3 meters. The problem with offsets is that it links the yaw estimate of the vehicle to its position. With a 3 meter offset a 180 deg heading estimate error results in the vehicle thinking it has also moved 6m. You might find it gets on better without the position offset, despite the fact that the antenna is genuinely mounted in that location. That would be:
AIMy drives like a forklift where the bow is like a keel and 4.3 meters back at the transom is where the stern swings from left to right to give steering, hence the 2.8m offset.
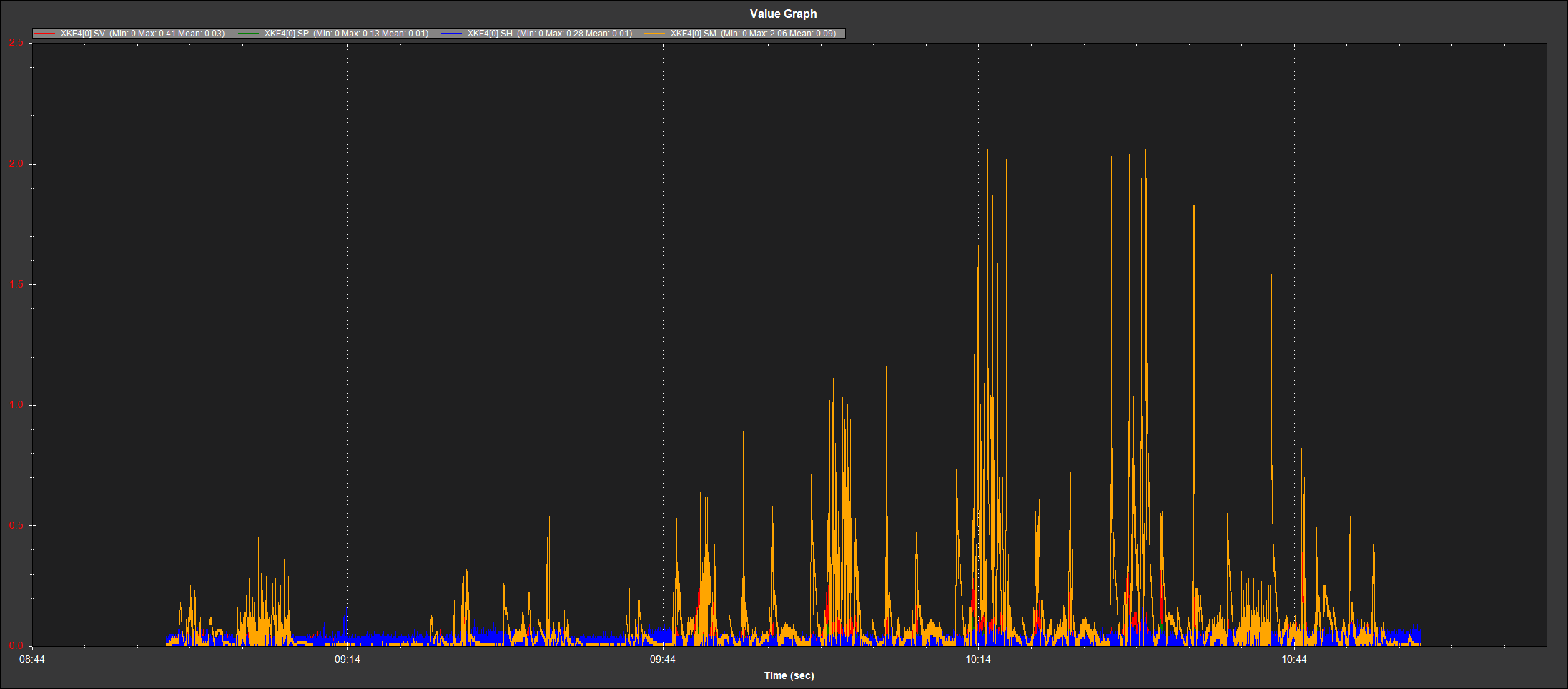
Are you saying the external compass should be set as the secondary compass?
Correct, based on that log the external compass is worse than the secondary compass in the flight controller.
Its tricky to say what could have caused it to go bad if it had been working OK before. It could just have been bumped and moved a little. There could also be some change that caused it, things like cable power cable routing can make a difference.
@iampete, the large forward GPS offset is the result of a pretty arduous tuning process that @rmackay9 and I helped work through. The yaw estimation behavior you mention is news to me and definitely worth noting! In this case, I’d be pretty hesitant to move that value back to zero, since it was a fairly key player in achieving near perfect pivot turn behavior.
@John_Easton, with the time and likely cost involved in your efforts, it may be well worth exploring a moving baseline (GPS for yaw) setup on your craft. So long as the GPS environment in the areas where you work is healthy (no jamming/spoofing present), you can expect outstanding results.
Using two GPS antennas ~0.5m or more apart along with precision GPS modules creates a heading reference without the use of a compass. Those of us running combustion engined vehicles often find it preferable to magnetometers that are subject to interference.
Yes, this has certainly been something I have been hoping to avoid as I have wasted a lot of money when I have dabbled in RTK.
I can’t help thinking how perfect my one boat ‘AIMy006’ is - 6 days straight 10 hours a day which does not have RTK. I cannot ask for anything more.
Then ‘AIMyFE00’ works perfect for months, then all of a sudden I arrive at a location for a huge job and she behaves like a drunk teenager on the freeway.
Finding the cause HAS to be possible, and even more important … a FIX with the gear you already have.
I’m certainly not trying to empty your wallet, I just think you’d benefit from such a configuration.
You don’t need a fixed base station to use a moving baseline configuration - it is self-contained onboard with the two antennas/modules.
Anyway, it’d be best to get to the root cause of the issue at hand before investing time and effort into yet another bit of kit.
Sometimes parts go bad. Sometimes a new source of external interference crops up. I don’t know how to nail down a root cause, but the compass is definitely a symptom. Using Pete’s recommendations should hopefully point you toward better performance.
Thank you for your help as always Yuri, it is much appreciated.
I do agree with your recommendations as reliability is very important to the operation of my business.