I am trying to make an obstacle avoidance drone with a nano radar.The exact specifications of the radar are as followed:
MR72
77GHZ Nano Radar
UART Interface
And the flight Controller is the Pixhawk Cube Orange Plus
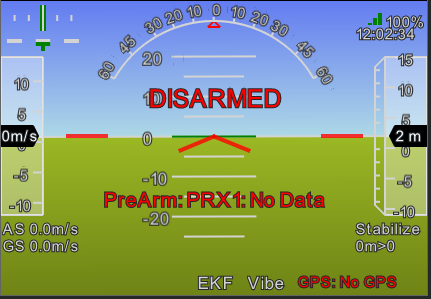
In the documentation it says to change the telem2 protocol to the Lidar360(serial2_protocol=11) option which I did.Also,it says to set proximity type as Tera Range Tower it(PRX1_Type=3)The problem I am facing is as followed:
PreArm:PRX1:No Data
I do know the nano radar is working as I am recieving data on a TTL USB connected to Serial Plotter on PC.
If anyone can help in this issue that would be great.
According to the documentation, it says to set the baud to 115200(serial2_baud=115).I did that.Also yes,I do restart my flight controller after changing the parameters each time.
When you buy mr72 radar have requested OEM to change the firmware to work with ardupilot flight controllers, generally normal MR72 doesn’t work with pixhawk as plug and play…radar firmware need to change.
If that also done have you powered radar by isolate Power supply from external source not from flight controller itself.
Yes, I have tried with both external power supply and powering through the flight controller. And yes, I did ask the OEM if the firmware is to my specifications. Will update when I get a response.
So, either the firmware needs to be changed or I am going to need a companion computer (CC) along with the radar to read and send data to the flight controller.
I have checked with the OEM and the protocol to follow was CAN, not UART.
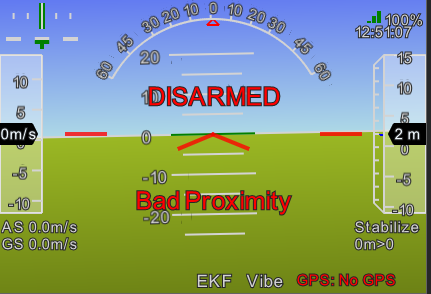
So I have changed and now I am getting a new message which I don’t know is a step forward or not.
Second update:
Got the Nano Radar working.The protocol is UART as before,not CAN.My mistake.But the bad proximity error still remains.Probably just a loose wire or the power reaching the nano radar is less than 12V.
Hi there,
I am also trying to work with an mr72 radar. Did you change the comm protocol from CAN to UART ?. If so ,how can that be done. The radar with me now is giving data in CAN protocol.
No.
I didn’t, the module I received was in the UART protocol. This module comes in two versions, one that has CAN protocol and another with UART protocol. It can be changed by opening the casing and rewiring the connections however no datasheet is available so I would strongly suggest against it.I have yet to do some testing on my own of rewiring it.
Not yet,the main problem right now is that the connection suddenly breaks between my radar and the PX Cube.It works fine for like 5 to 6 seconds then no data arrives.Still trying to troubleshoot that.