I did a test run on my quad today (18" Prop, all carbon fibre, 3S, Pixhawk, FW3.3.3, autotuned on all axes), pushing it really hard with fast flights to see where the limits are.
Several times during the flight, when coming out of a fast forward or sideways move at max speed it started to oscilate for a moment, then caught itself and all was fine. I think this is a known behaviour that can be fixed with an increase of MOT_THR_MIX_MAX to 0.9 (which I did). However, at the last attempt it started to oscilate so badly it did not recover and crashed badly
I am not too worried about the damage, just parts, but I would like to understand what caused the behaviour so I can tune it out/prevent it from happening again.
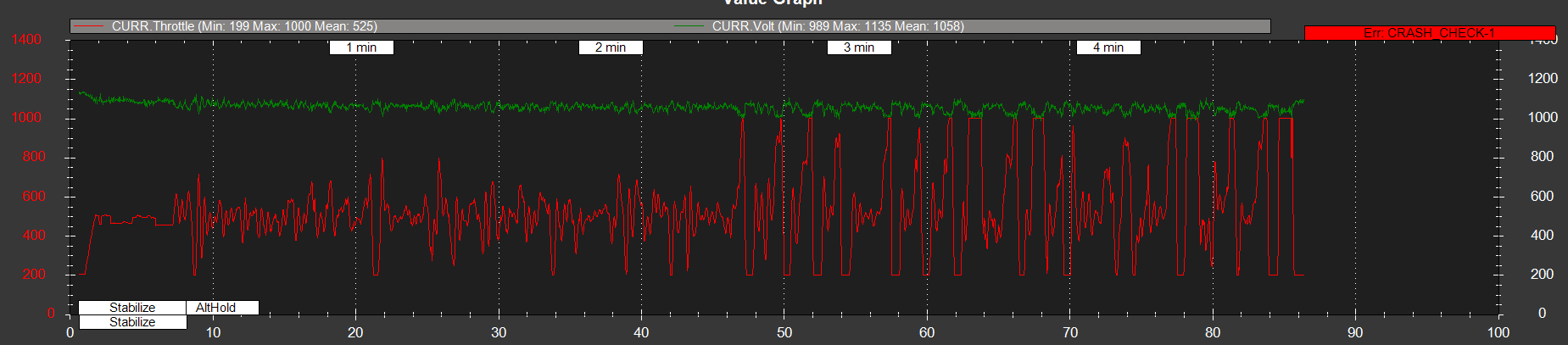
I spent 2h today looking at the log files etc. and to me it looks as if for some strange reason the overall throttle output is abruptly reducing, especially on RC2, causing the loss of attitude control.
I started with the biggest prop size I could find with a good efficiency (the APCs are rated well, 18" is the biggest they make) based on the paradigm that prop size matters most when it comes to generating lift.
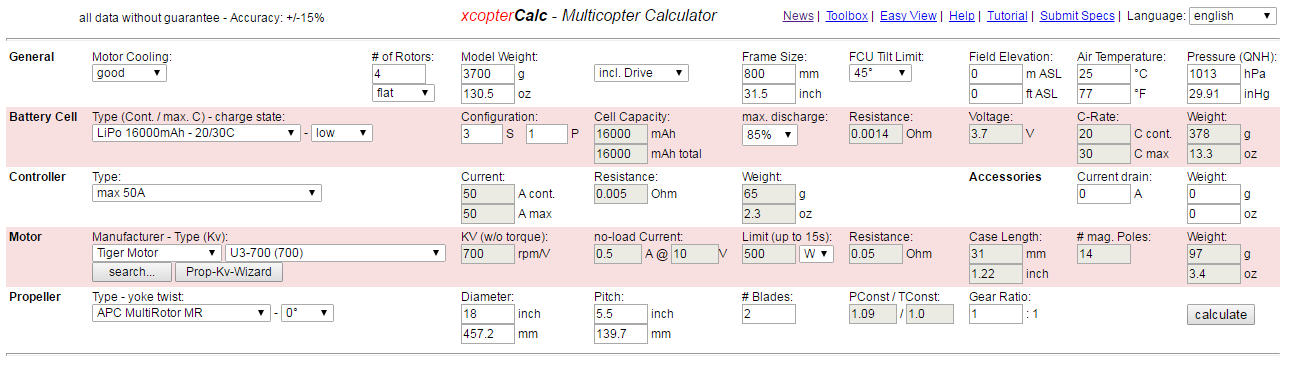
I then choose the Tiger U3 + 3S battery to go with it based on the results of the online calculator www.ecalc.ch.
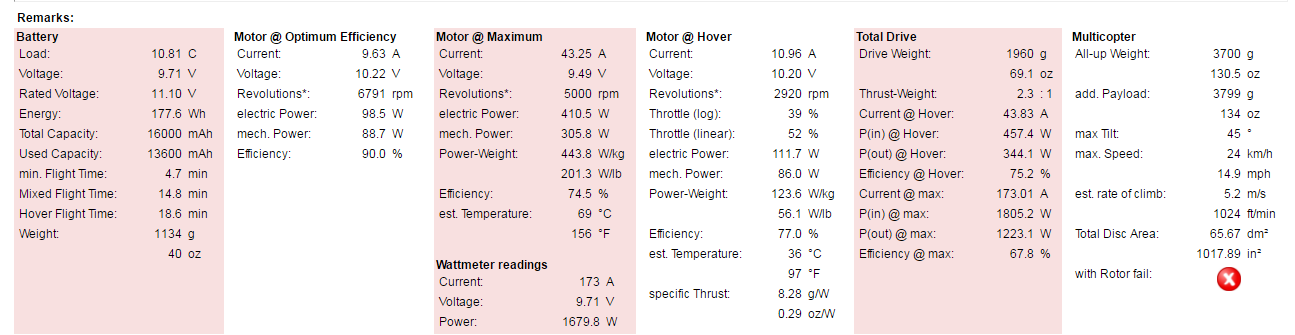
If you plug these stats into there it looks like this would be a nice combination - hover at 51% throttle - ESCs and motors never overloaded even at maximum load - a reliable config for everyday use out in the field that can be sold to customers etc. without the need for worry/maintenance.
I guess what the calculator does not show/consider is the behaviour with a nearly empty battery when pushed really hard.
I guess I hit a point where pure numerical calculations tells you things are fine, but real life flight behaviour is telling me something different…
The one thing I don’t understand yet is why the flight behaviour changes so abruptly halfway through. If you graph throttle over the duration of the flight you can seen that about halfway through the maxing out starts (I did not consciously push it harder then). Looking at the voltage, it seems up until that point in time the voltage average was above 10.5V (my lower threshold for voltage scaling), after that the short tern average is below 10.5V (so no voltage scaling any more). Could that be causing the change in behaviour?
Ecalc works okay when using motors within specification but brakes down at the extremes.
It also doesn’t take into consideration things like rotational inertia of the larger propeller so the heavier the propeller, the slower it will react without more power to compensate.
thanks so much, I learned something important today then - for my next design I will surely take this into account.
This specific copter is supposed to be a (small) camera ship for up to 500g of payload “only”, so I don’t really need it to be super agile, very fast or do stunts etc.
Considering this - is there a way you can think of to “tame” it, i.e. prevent it from going into extreme flight conditions upon accidental extreme stick input ?
I am thinking that limiting the maximum lean angle might do the trick - at least in AltHold modes it would prevent the motors from maxing out if the limiting angle is choosen right?
The flight controller responsiveness and rc handling are somewhat separate. You want it to be capable of handling razor sharp then dial back the rc feel and dual pitch/roll rates on the handset to make it less responsive to rc input without restricting the flight controllers authority.
Badly tuning a machine to make it less responsive just makes it dangerous. It will tip on landing, struggle to hold position, get blown around in the wind etc
limit the pitch/roll, this is a very bad idea, a bit of wind and the machine is gone, because of the limited authority it wont be able to lean enough to go upwind.
make the machine lighter with a much smaller battery
change the battery to 4s and get smaller props, this is your best option but not the cheapest.
I think that anything short of fixing your battery and prop sizing is just going to lead you to having more trouble later on. Get things set up correctly. Replacing your props and batteries isn’t going to cost that much, and it beats having to replace everything after a crash.
While I am no expert, I have never seen anybody trying to run props as large as yours with a 700KV motor. For the props you’re using, Tiger Motors would have you running the 280KV U11 (on a 6S battery).
For comparison purposes, I’m running 320KV motors (Tarot 4114) with 15" props on a 6S battery, and the quad flies very well and has lift to spare for a camera etc. The all-up weight on this vehicle is just under 3Kg.



 - for my next design I will surely take this into account.
- for my next design I will surely take this into account.