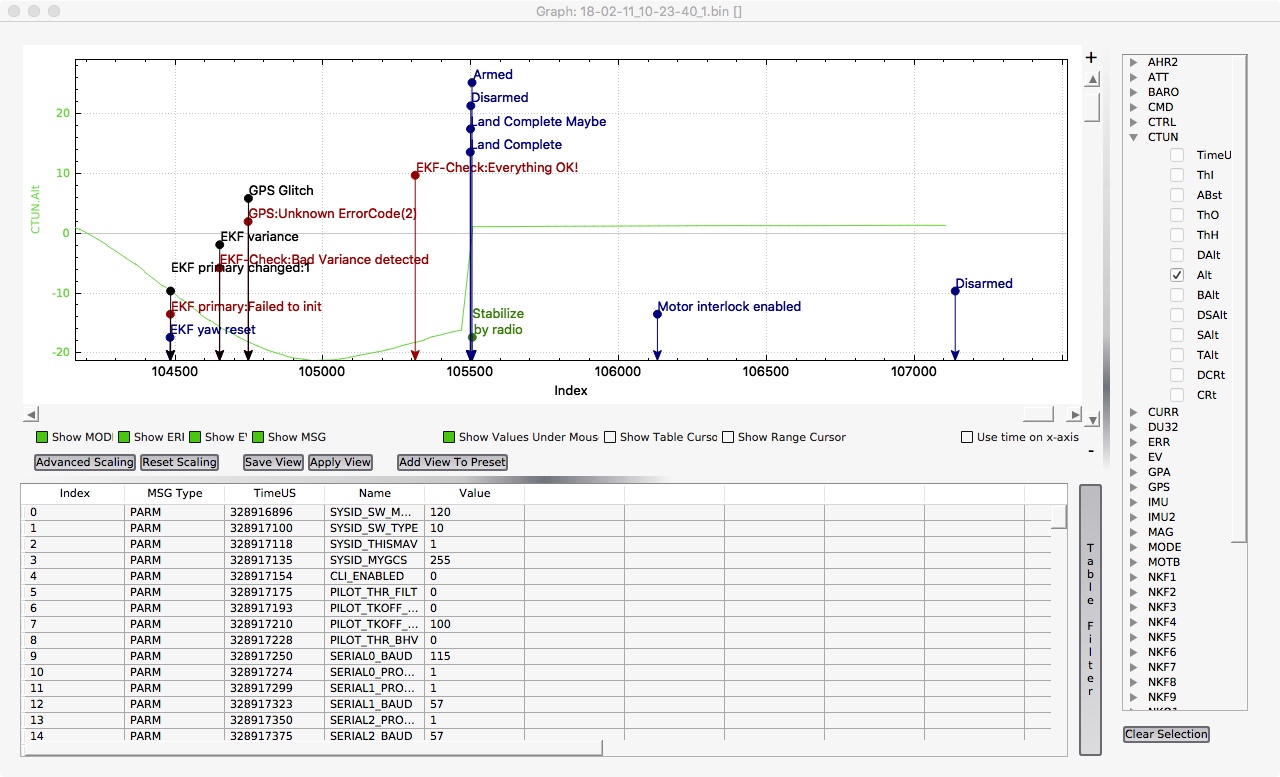
On February 11 of this year, I was flying my miniQuad 210mm, in a day of normal weather conditions, and after having flown for about 10 minutes, my quad collapsed from a height of 7 meters, from which I could observe the loss of engine power number 1, which stopped working. So after taking a look at the flight log, I found some strange details, for example: I saw the following message twice “Motor interlock enabled”, I have never played with that parameter and I have no idea why it was activated.
That situation is frustrating for me, because I do not know exactly what caused the accident.
Any help they can provide, will be very valuable to me.
Have you autotune this copter yet?
It could be that its just too reactive and you flipped it then panicked and pulled the throttle off.
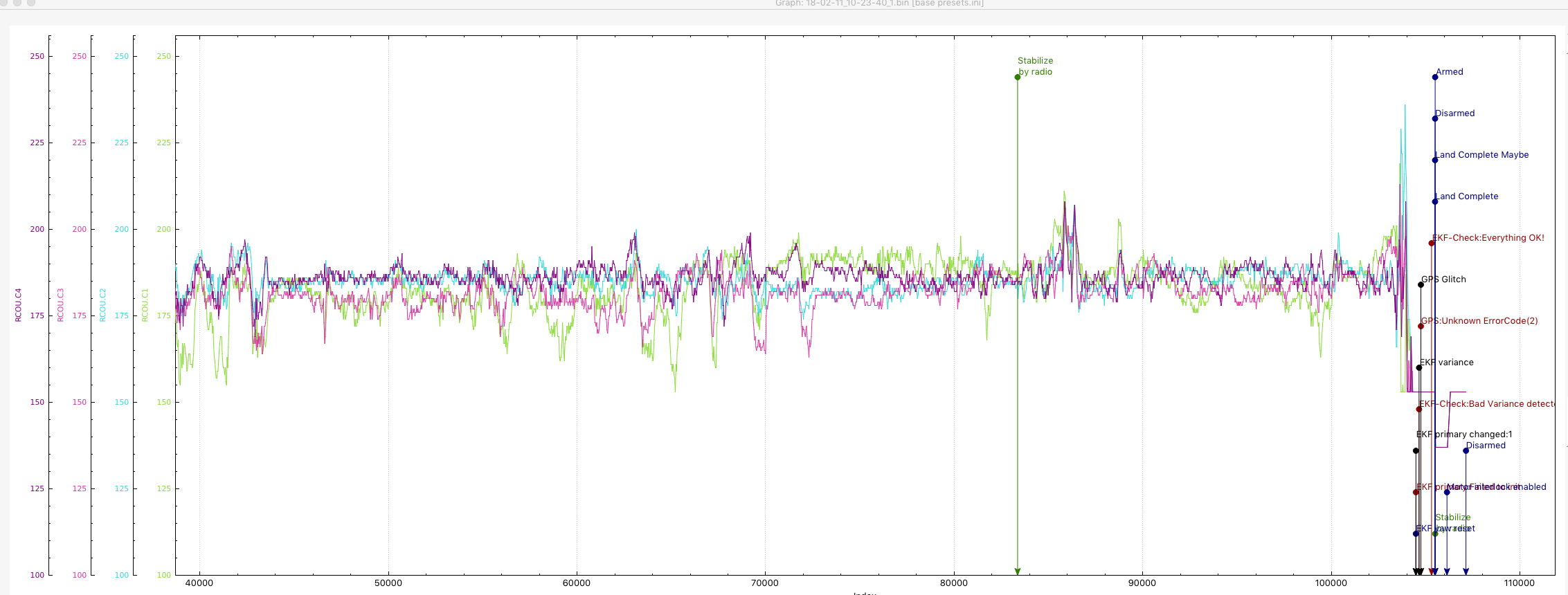
Motor #1 doesn’t seem to be reacting the same as the other motors though.