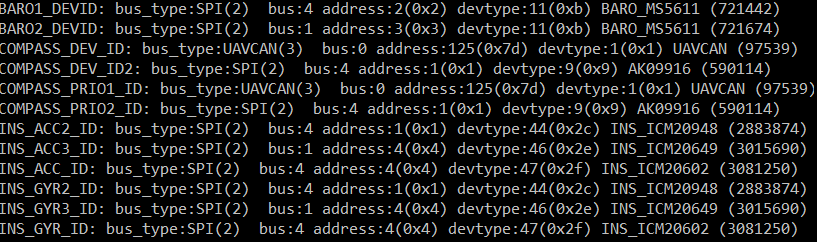
Just one doubt, I think you calibrated the internal compass because here it shows DEV_ID2 for the internal compass and DEV_ID for the external compass. I put the preference for CAN compass so I need to update for the same right?
And second, If I integrate the payload and other things then again compass offsets will change so again I guess I have to calibrate it using magfit and update the parameters right?
This seems a very interesting and advanced way of calibrating the level. Do you mind sharing some Images/Photos so That I can understand it better and maybe make one for me?