The 2nd log there actually looks good, attitude and desired attitude are quite close.
The harmonic notch filter is set up correctly.
Just set this so we can see the results in next flights
INS_LOG_BAT_OPT,2
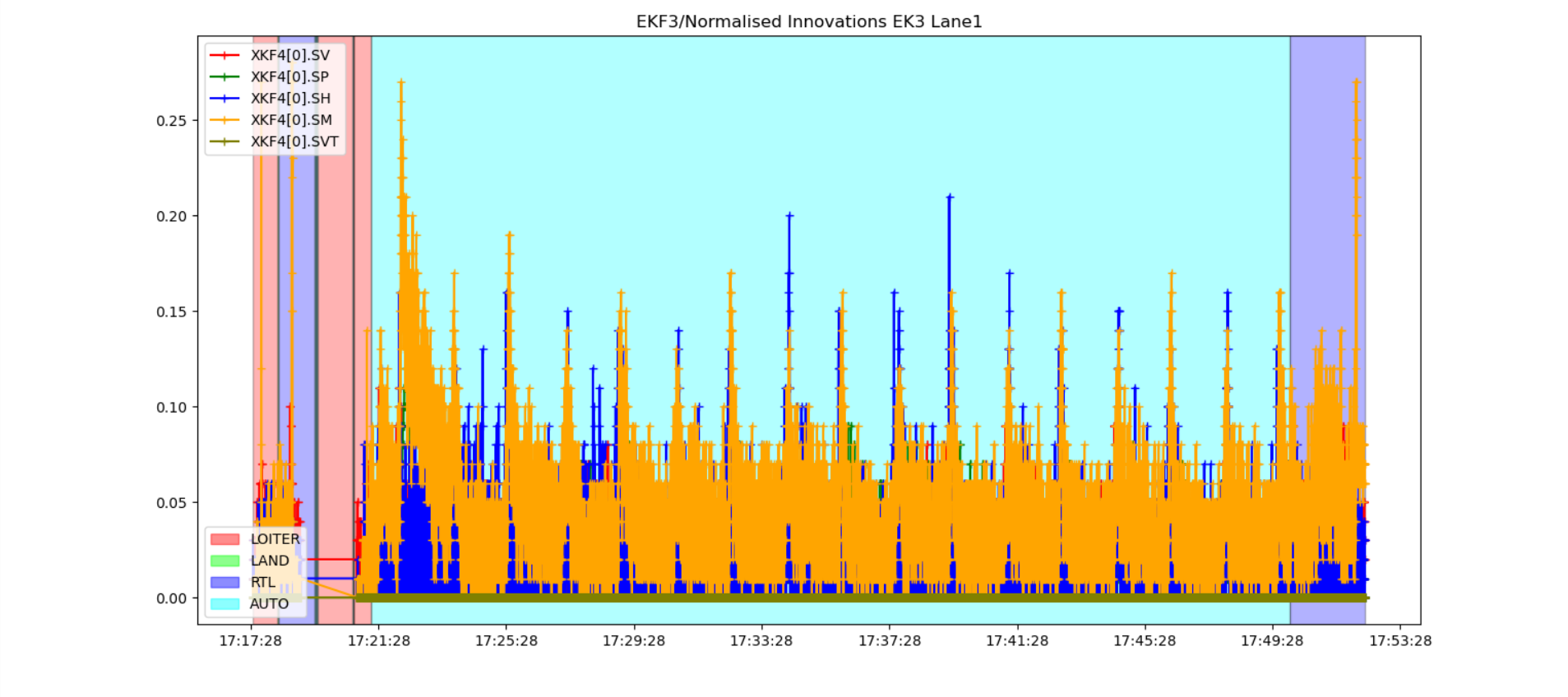
I see no differences between the last log and the previous log to cause the apparent lack of control.
I think there’s 2 things to do to fix this.
- Set the Fence, probably take off in AltHold anyway especially during testing
- Adjust some position control parameters
1
I highly recommend setting
FENCE_ENABLE,1
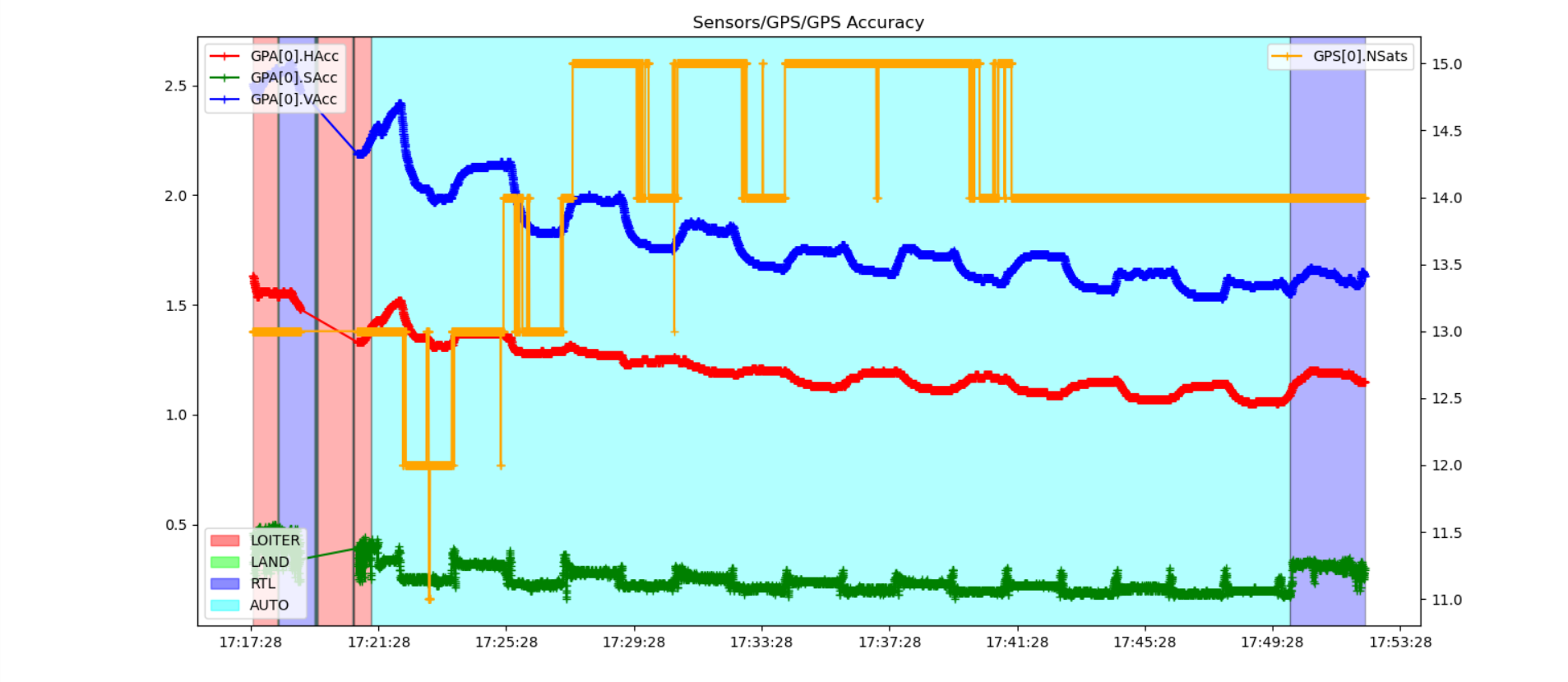
then you can not arm until Home can be set. This can take a while but it means you at least have a known-good home point and relatively stable GNSS positioning. And you have time to think about your preflight check list and planned flight 
2
Since you are arming and taking off in Loiter, it could be affected by the GNSS position wandering.
You can test this by arming and taking off in AltHold , hover a while to see if everything looks OK, then switch to Loiter and see if there’s movements and what looks like oscillations.
If so, set these, half of their default values
PSC_POSXY_P,0.5
PSC_VELXY_D,0.25
PSC_VELXY_I,0.5
PSC_VELXY_P,1.0
Well, probably set these values anyway, there’s no real detriment.
Other stuff
RC control can be quite sensitive, if yours is try setting
ATC_INPUT_TC,0.22
In logs it looks like you are taking off from a slope, and in flight pitch and roll are a couple of degrees apart.
Maybe recalibrate “level” by using a spirit level across the tops of your motors and packing under the landing gear to get the “prop disc” as level as possible, then in
MissionPlanner, Mandatory…, Accel…, Calibrate Level
or
QGC, it’s called Level Horizon
BATT_FS_CRT_ACT probably should be 1 instead of 2. There’s usually no chance of doing an RTL at critical voltage level.
Your current measurement is actually following the voltage measurement, so that’s wrong - but it wont affect performance or stability. It will be nice to get it correct. Did you have the power brick that came with the Cube Orange?
Normally these are the settings when using the PowerA connector
BATT_VOLT_PIN,14
BATT_CURR_PIN,15