this log could tell the tale
there is asymmetry response in your autotune log
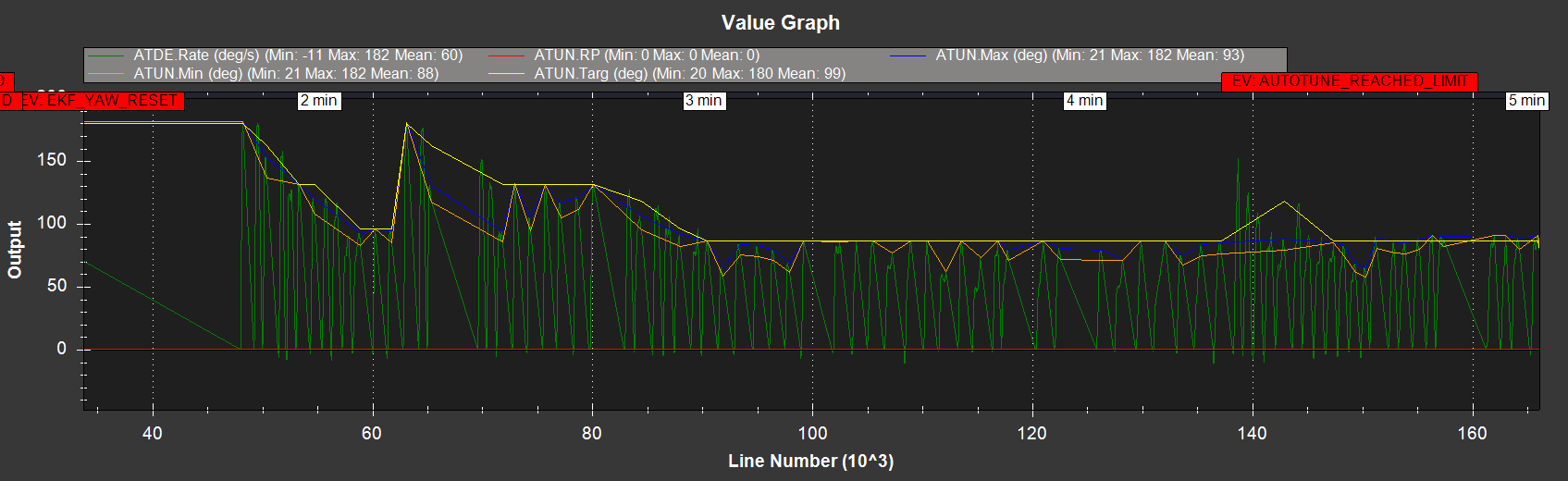
a good response on autotune must be like this

and there is noise on your Rate values
maybe its because of flexible arms
i think harmonic notch filtering will help you
this log could tell the tale
there is asymmetry response in your autotune log
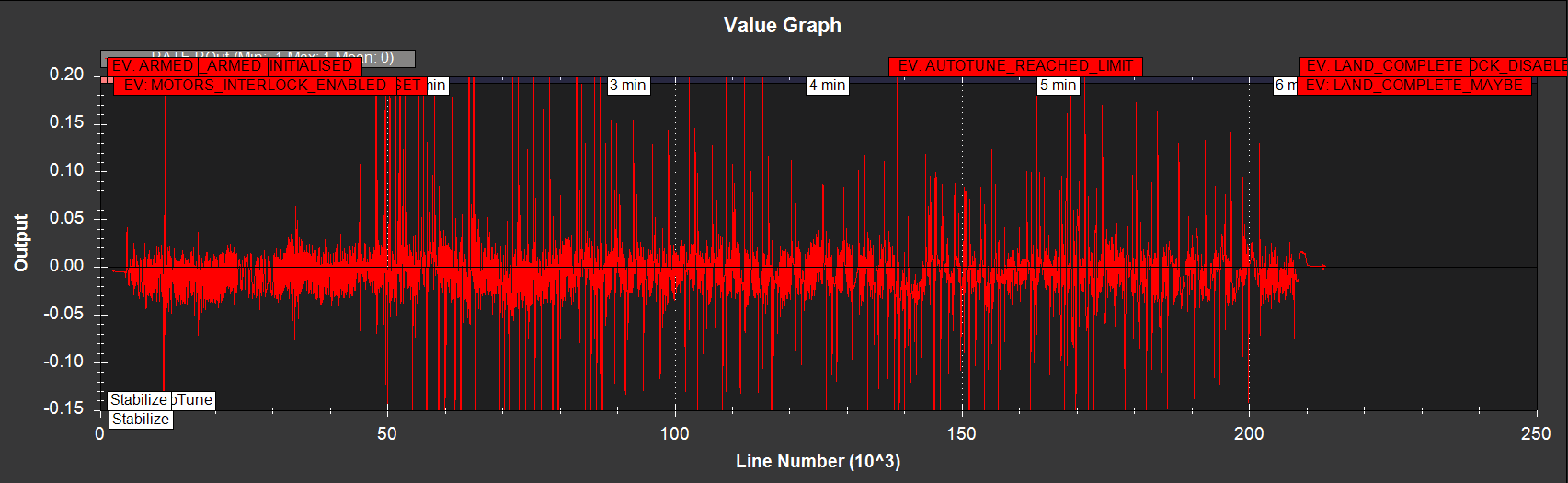
and there is noise on your Rate values
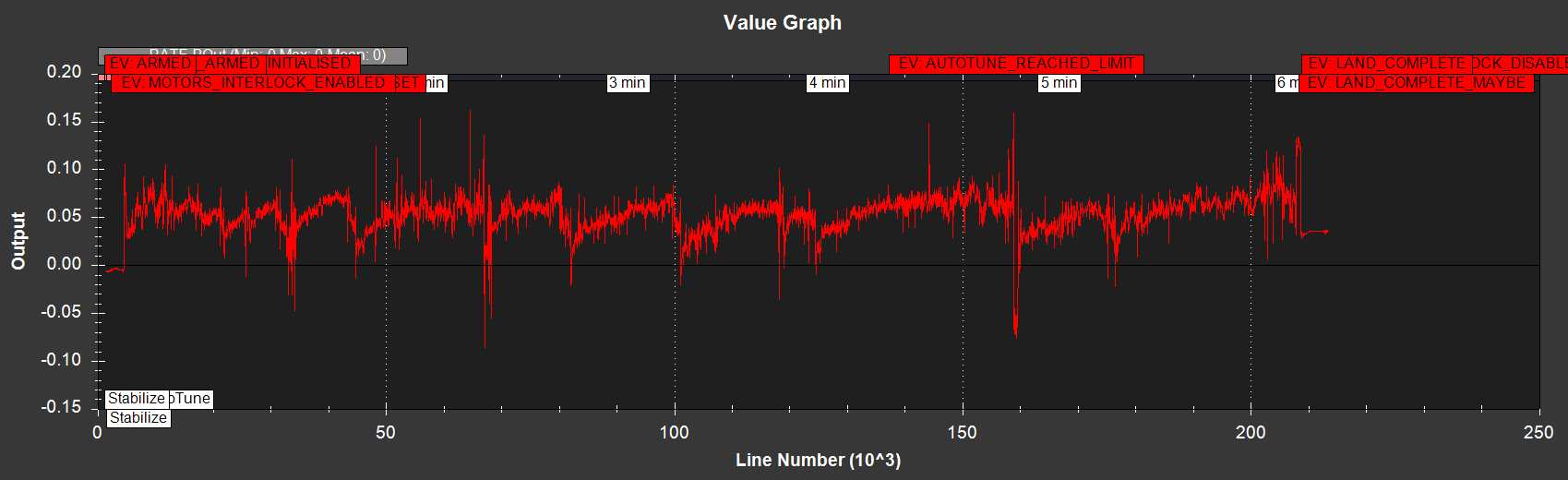
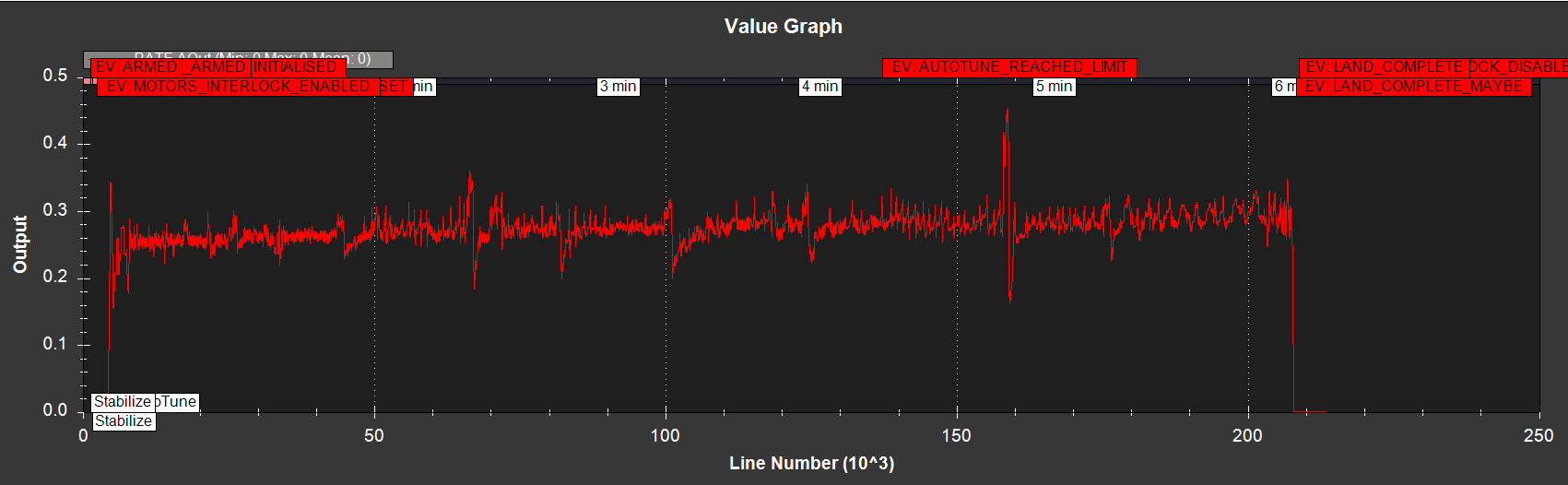
motor outputs are good so ESCs are OK
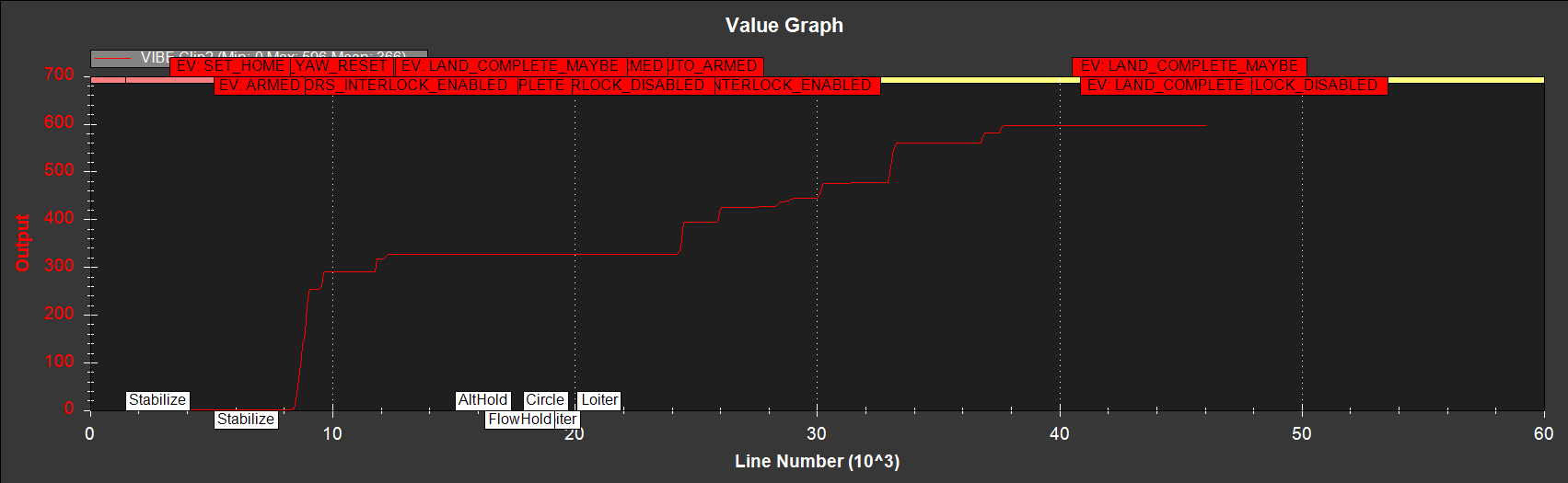
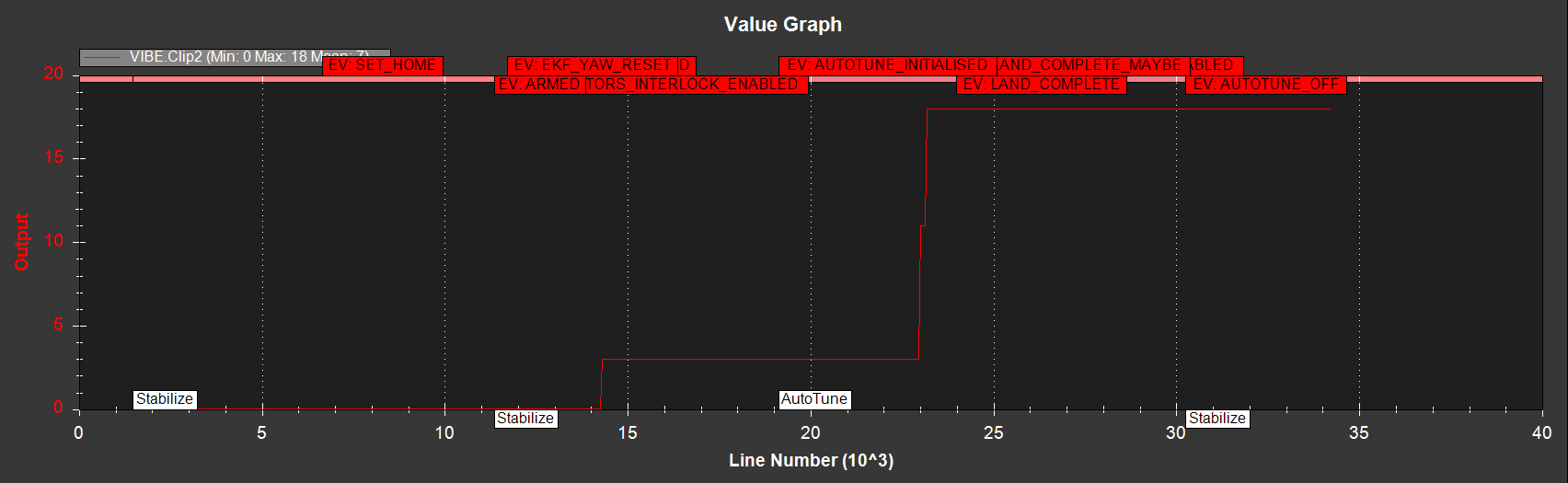
but look at here , there is clipping in your log before switching to autotune and flipping
Graph the Clip0, Clip1 and Clip2 values which increase each time one of the accelerometers reaches its maximum limit (16G). Ideally these should be zero for the whole flight but low numbers (<100) are likely ok especially if they occur during hard landings. A regularly increasing number through the log indicates a serious vibration problem that should be fixed.
I mean autotune didn’t flip over
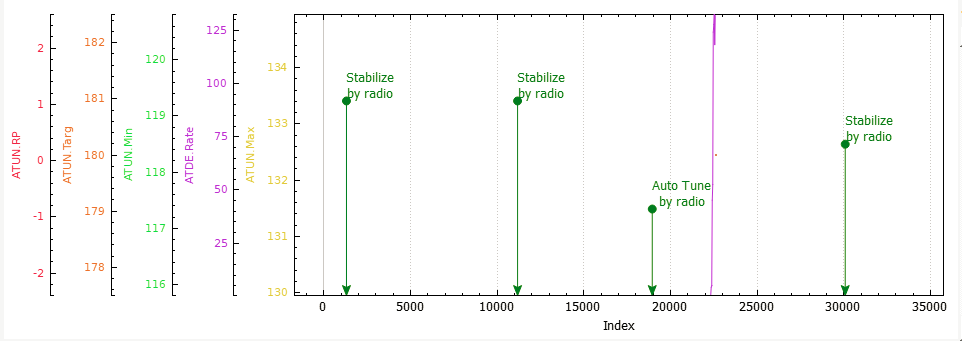
Probablu they depicts the flipping movement? Therr werr not big movement variation until I switch to autotune, when it flips the quad over pretty quick crashing against the floor. Because I know that, I don’t swap to autotune fliying high but at around 1 meter ti minimize damages.
@hosein_gh, grapsh you have show before correspond to the “1st autotune” which, despite it didn’t finish on time before the battery ran out, at least there were no flips.
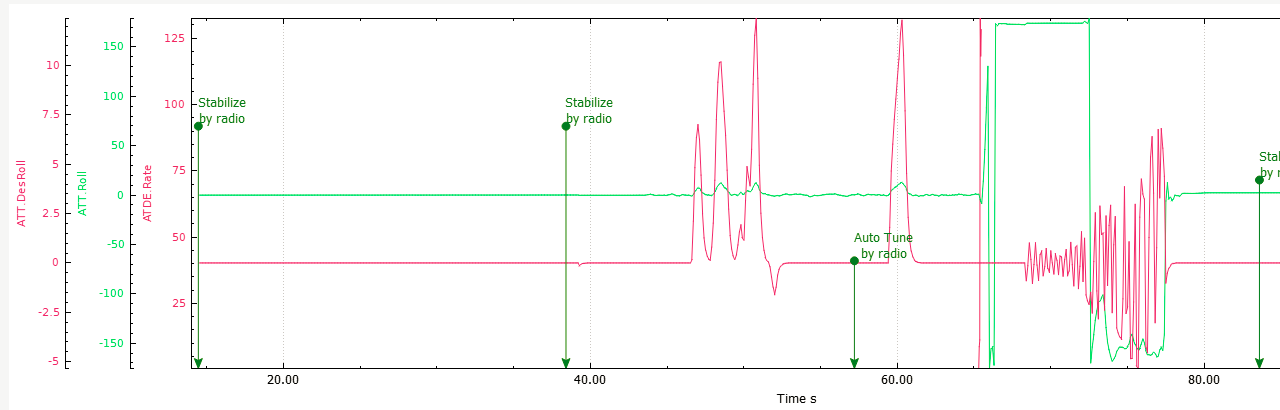
The following one was from 00000024 log, last autotune unable to survive after the 1st twitching crashing my quad (again)
Desired rolls vs actuals (crash on second 60):