HI all,
My Pixhawk Cube Orange flips over when autotuning and it’s driving my nuts (there are couple of things driving me nuts).
I’ve mounted my brand new Cube Orange in my 450 quadcopter (TBS Discovery) where I usually set two 4S batteries in parallel. The new set up flew nicely, but with some vibrations. After try it time to autotune came… and right before one of my batteries died.
So placed order of a new battery and meantime I’ve run an Autotune using only one of them. Autotune worked pretty fine, but there were no time enough to finish up because ran out of power. Very happy, everything seemed running nice.
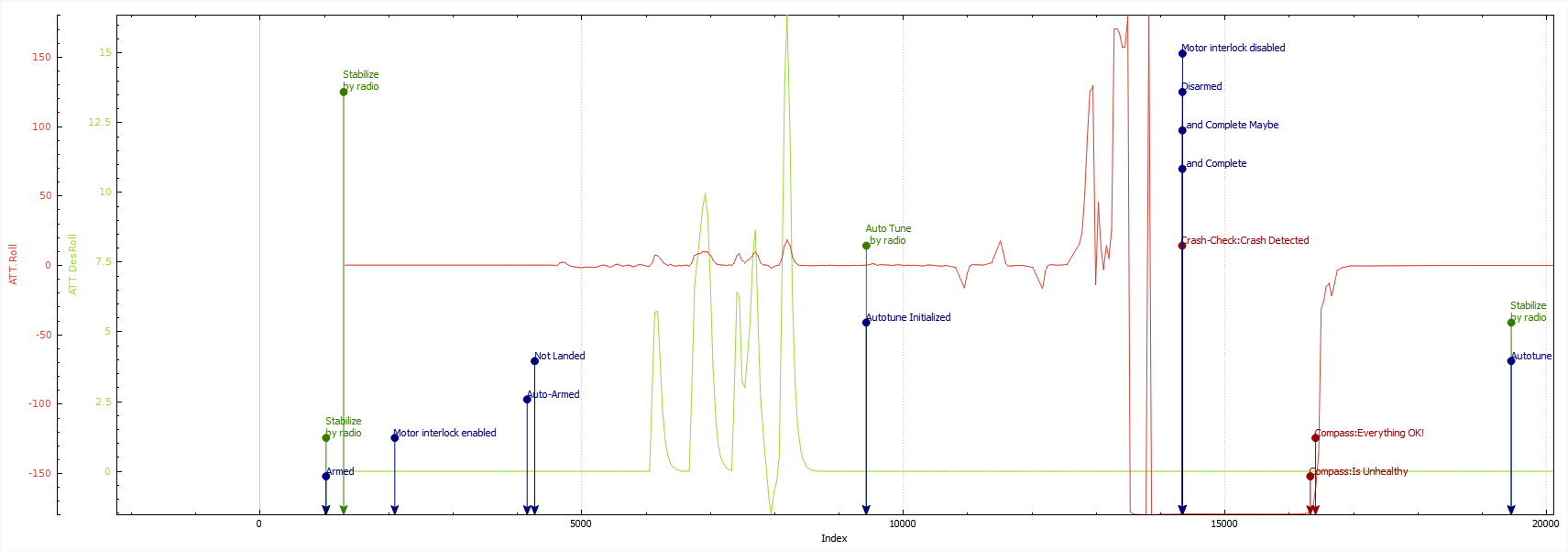
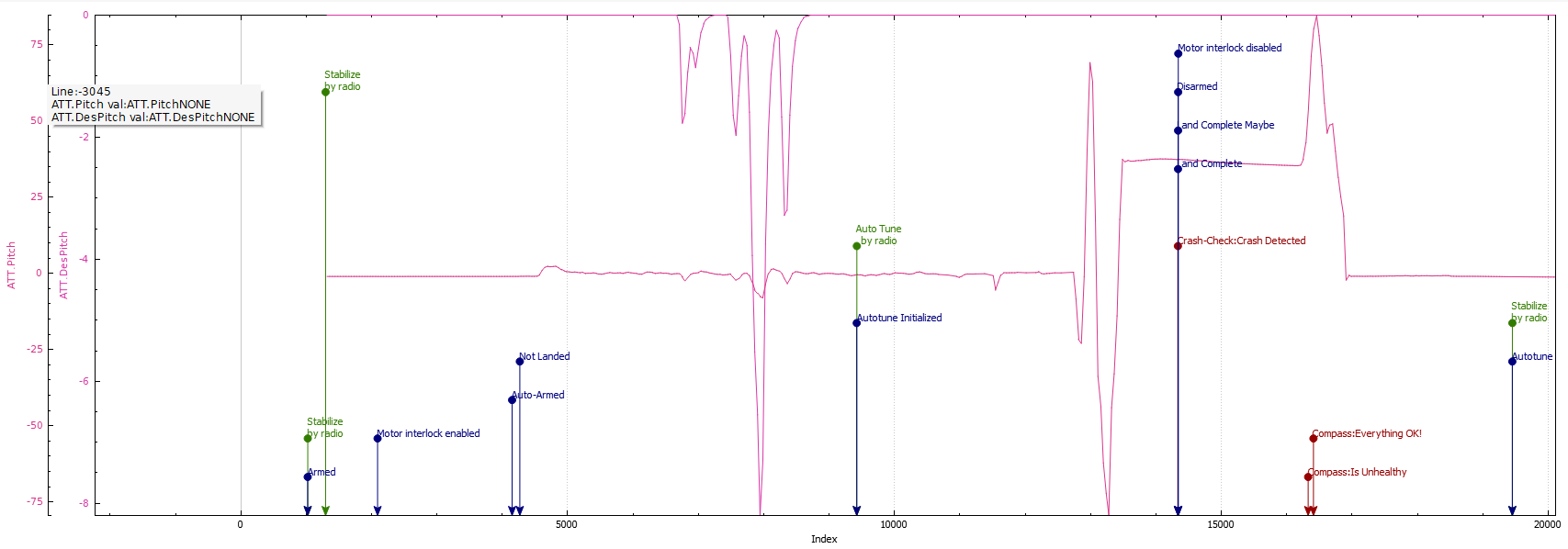
When my new battery arrived I’ve put it in parallel in my copter and went off home to run a new Autotune session… which took few seconds before my quadcopter killed itself by flipping over… Only a propeller broken… that one was cheap.
In summary, before 1st autotune, I’ve run some ESC calibrations. 1st autotune went well during the time it lasted (many adjustments for both, roll and pitch). 2nd autotune changing nothing but newbattery and few secound of succesfull stabilice fligh.
I’m wondering whether someone could give me a hint about the issue. Plase, see attached the corresponding log file.
Many thanks!
00000020.zip (710.2 KB)