Hello,
I have just finished building my first drone. It lifts off ok and seen to be stable ( I use stabalise mode). However after a few minutes in the air it is not controlable anymore and starts to make circles. By pulling the throttle down I was able to save my drone.
I have looked in the logs and think I see some “strange” behaviour in RCin RCout (especially motor 3)
Can one of the more experienced drone pilots help me out and analyze my log?
Only if you post a link to it.
Hello Dave, I am sorry , English is not my native language. But I do my best. Anyway thank you for your reply. I try to upload the log file but it will not let me . The file is too big. How can I post it via a link?
Upload it to a cloud storage site (DropBox, etc) and post a link to it. Log files are generally too large to post here.
OK thanks Dave: here is the link:

Thank Hosein for your reply. I checked motor directions and so on but for the rest I kept the default values. Because the copter seems to me pretty stable in the beginning as I look at it when it is in the air and only after a couple of minutes starts to behave “strange” I did not think of that. Anyway I will follow your recomendations and follow the complete tuning instructions guide.
Best Regards,
Rob
Hello, I have followed the desired calibration steps as recomneded but I still have a problem with my drone. It seems to be stabel in the air at first with not vibrations in stabilize mode. However after a few minutes it starts to descend and I am not able to control the heigth anymore. What I see is big differences between some RCIn and RCout signals (5 and 6 the most) but due my lack off knowledge/experience I am not able to draw a conclusion from that. I hope oned of you more experienced pilots can help me. I have attached the link to the log.
Best Regards,
Robhttps://drive.google.com/file/d/1HPQM-Z6RDTwpKq0W9XX5IbneJ5hTucUd/view?usp=sharing
Could you please send full specification of your copter ?
motor , propellers , battery …
Hello,
550 hexa
pixhawk 2.4.8
Ready to sky 30A opto esc
Ready to sky 920 kV brushless motors
external GPS & compass (M8n)
4s 5000mAH lipo
10x4.5 mrp props
Best Regards,
Rob
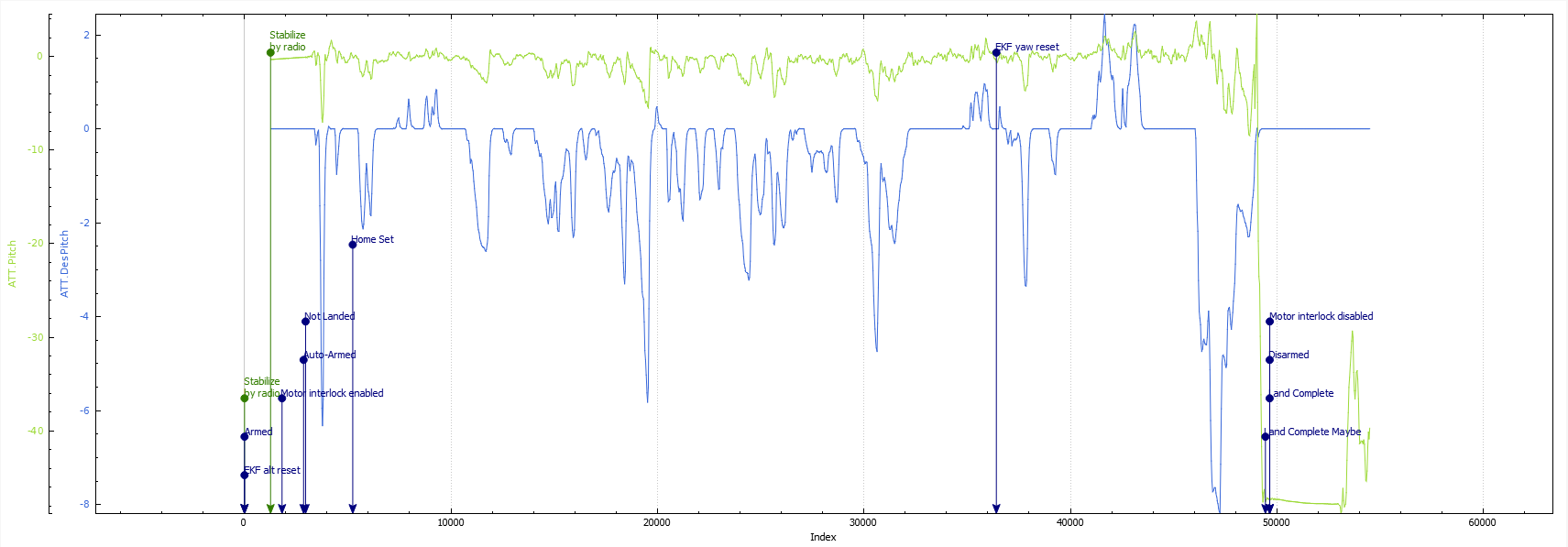
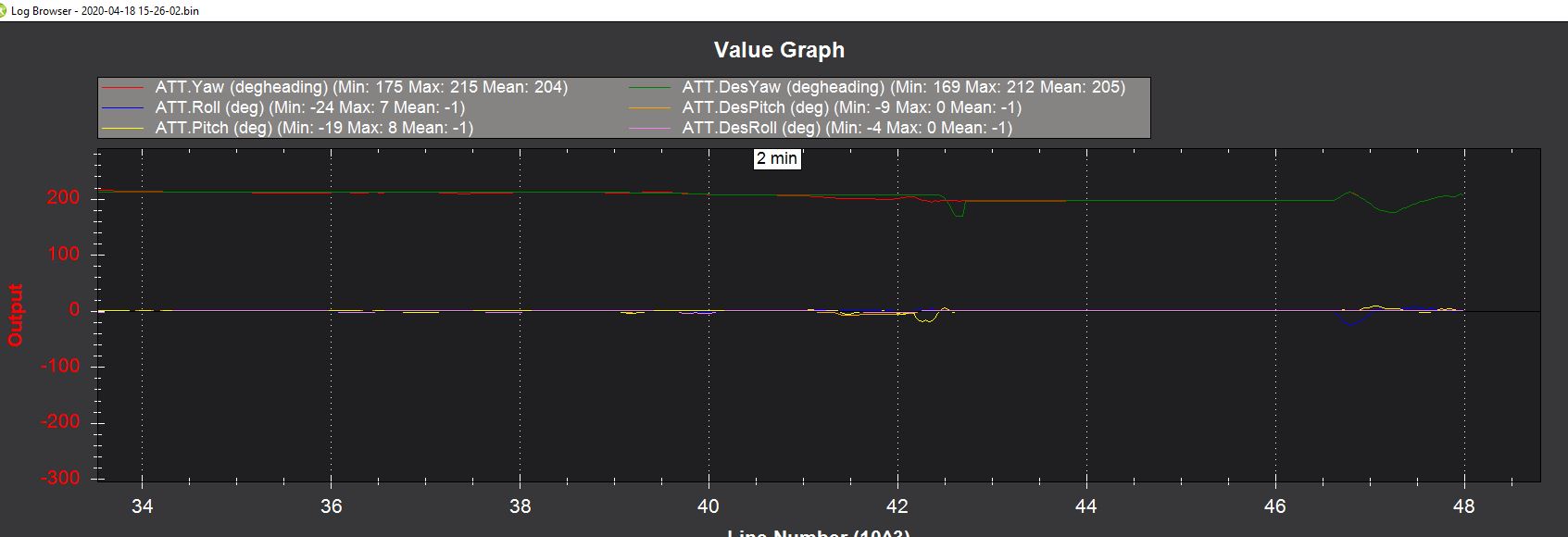
Your pitch and yaw are not to bad, as expected from an untuned copter of this size, but your yaw is telling a different story.
Check out the instability in yaw.
Twisting arms?
Loose motor mounts?
Motors not level?

Your vibration levels are very good but there is a strange pulsing in the Z
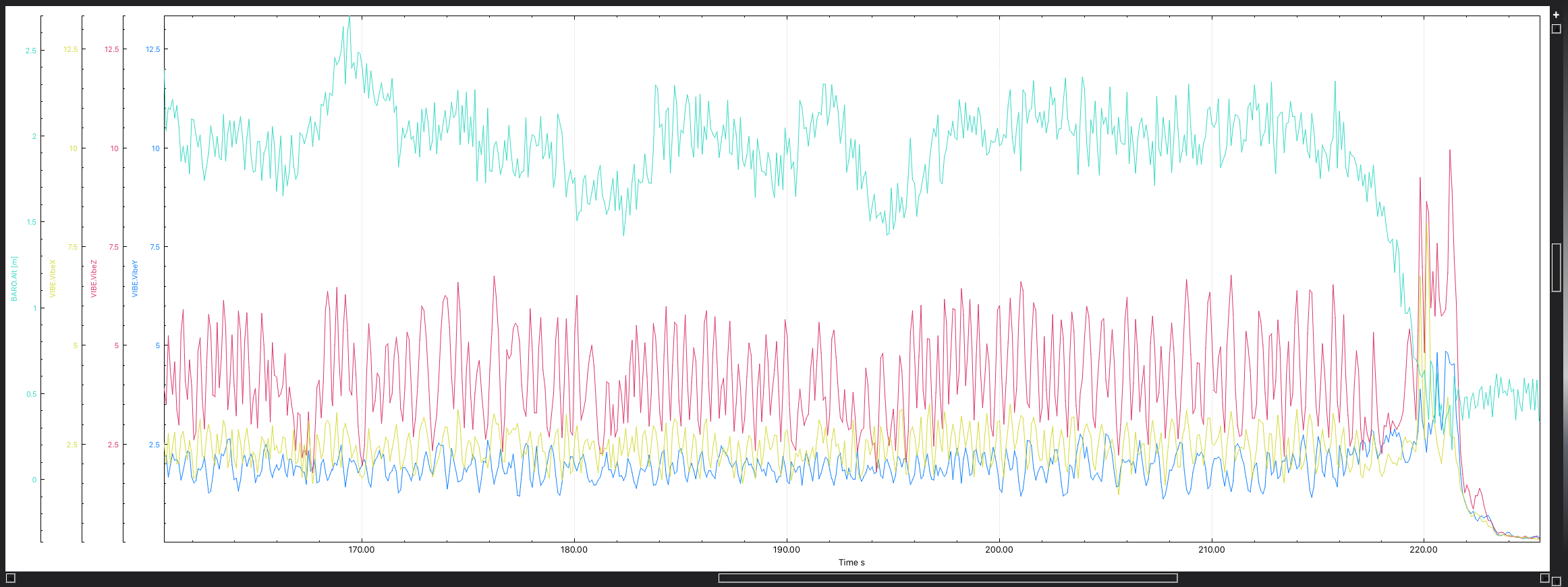
It could be just a wire hitting the controller but worth investigating
Hello Mike,
Thank you very much for your tips.
I will check
Motors and arms are ok regarding level and mounting.
Is the pulse in Z not caused by the landing ? I do not know the program you are using to analyze the log but I am using the analyzing in mission planner.
Do I understand it right that the yaw values also have to be “around” the zero line and not around the “200” line?
I have checked wiring and improved routing however same problem.
I have tried several times (see log) to take off. The first time the drone seems to be stable in hoover but after a minute it started to descend slowly and landed without damaging the drone. After that I tried it a couple more times but the drone was only shortly stable in the air and then started to descend again. I was not able to let is go up again. It did not seem to respond to the throttle anymore.
Any other tips?