Hi I’m Non
I made my own hexacopter and tested it. It’s yaw left when I take off about 20 degrees and then stop what should I do to solve this problem?
my firmware is copter4.0.7
I already level the motors re-calibrate ESC and set CG to enter as much as possible but it doesn’t work
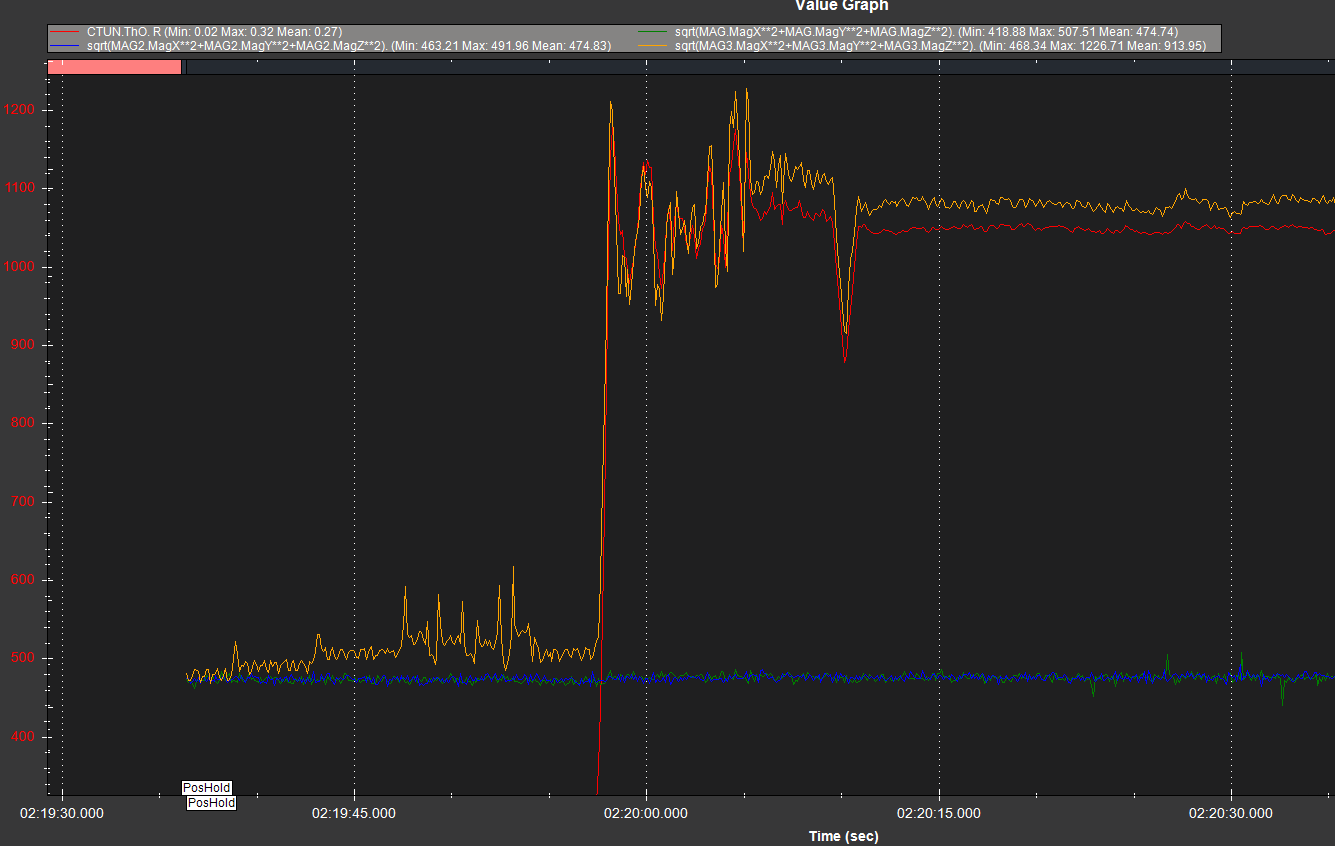
I’ve checked a few more things in that log and I think you can fix it easily by disabling compass 3
COMPASS_USE3,0
The alternative is you do a flight with lots of yaw action and we run that log through the MagFit utility to provide some better calibration parameters.
Also definitely upgrade to latest stable firmware, 4.3.2
The upgrade will keep all your existing settings.
There’s a good lot of config and tuning you can do to improve flight too, so let us know if you need help with that.
Hint: get used to using Stabilise mode, but AltHold and Loiter should be your most-used modes.