My drone just flipped in mid air and crashed when I was flying in altitude hold mode. I dont know the reason for it and in the log file too, the crash is not detected. I am uploading the binary log and the DF log along with this. Kindly review it and let me know if you can identify the reason for the crash.
Mid-Air power failure for the flight controller. Log ends abruptly, no other indication of failure. However Vcc seems very low and noisy, it should be in the 5.4-5.3V range, not in the 5.1-4.9V. Check flight controller and power module for cold solder joints and other possible causes.
If you see the altitude, you will notice a flat region, that is where the drone flipped and after that there is a sudden decrease in altitude which indicates the drone falling. Only after that the log ends abruptly. The power failure in the flight controller might have happened after the impact from the ground. I already checked the pixhawk and the power module for any cold solder joint and there werent any. I am still unable to understand why it flipped. I have attached a photo of the log file with the altitude graph indicating the 2 regions as explained above. Kindly help!! Capture|690x123
I really couldn’t see any major stand-out problem. From your description it sounds like motor or ESC failure but there’s no indication of that in the log.
Motor 3 and Motor 4 (RCout3 and RCout4) are going quite low PWM at times, indicating there might be a Centre of Gravity imbalance - however roll and pitch closely follow desired roll and desired pitch.
Vibes really dont indicate anything coming loose either.
So still I dont know for sure.
The C.G is exactly at the center as I am not carrying any additional payload. Also, before taking off I ensured that there is no C.G offset. The vehicle was perfectly balanced and infact it was underpowered, it takes off at 40 % throttle, ensuring enough margin for the flight controller to take any neccessary action for balancing the quadcopter, incase of any misfortune.
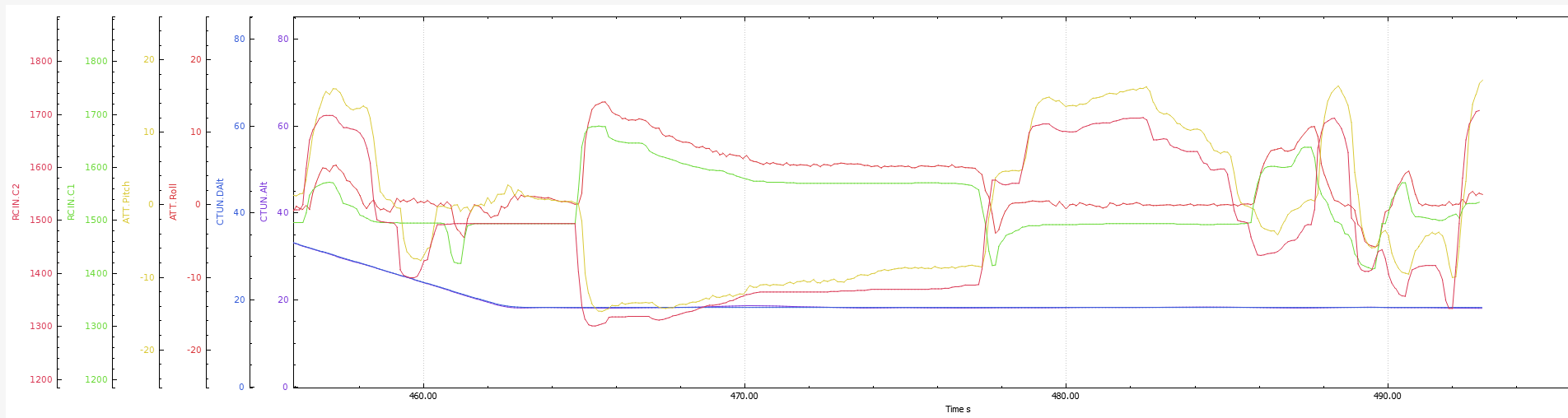
This is the last 30 seconds of the log. Altitude is holding around 18meters and roll/pitch movements in sync with RC inputs. I don’t see any flipping. Which means that logging stopped before the flip happened, therefore the mid-air power issue is still holding…
OK! Can you state the exact reason for the mid air power failure of the flight controller so that I can take some precautions to avoid such kind of problem in the future.