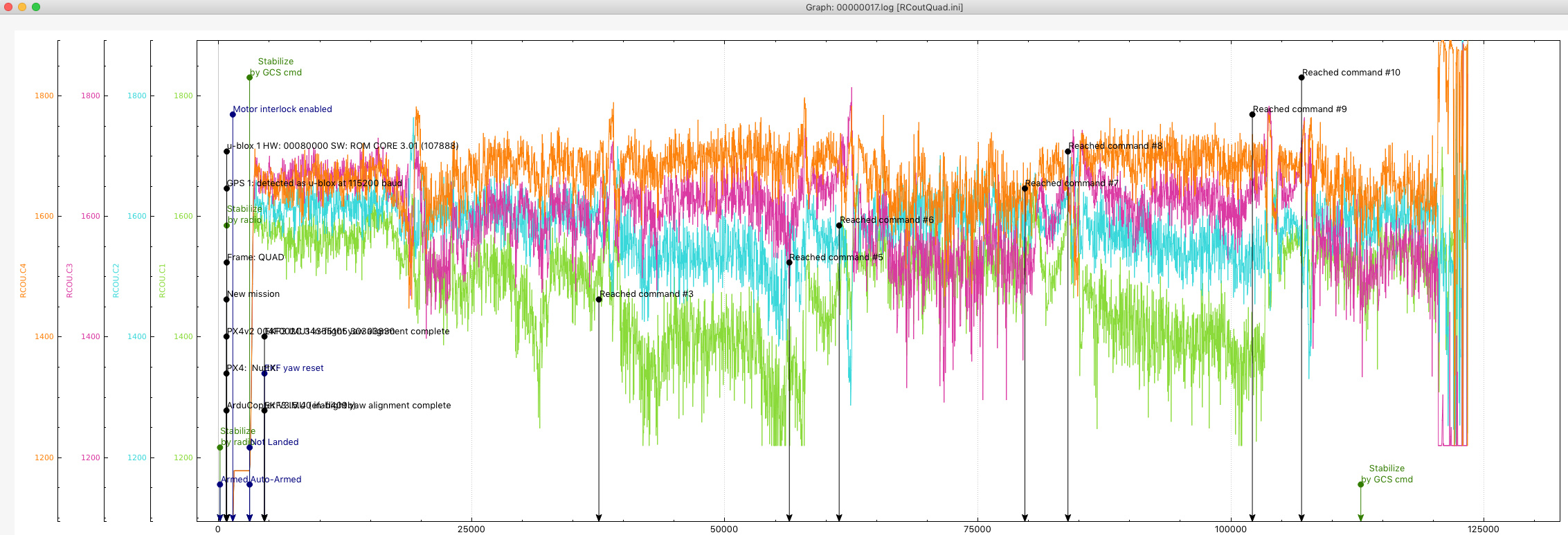
Really.Channels 1-4 are motor outputs.From your log.Servo 1-4 corresponds to motor PWM out 1-4 (in the code as 33-36)
PARM, 273053034, SERVO1_MIN, 1102
PARM, 273053105, SERVO1_MAX, 1927
PARM, 273053176, SERVO1_TRIM, 1514
PARM, 273053271, SERVO1_REVERSED, 0
PARM, 273053544, SERVO1_FUNCTION, 33
PARM, 273053620, SERVO2_MIN, 1102
PARM, 273053696, SERVO2_MAX, 1927
PARM, 273053774, SERVO2_TRIM, 1517
PARM, 273053877, SERVO2_REVERSED, 0
PARM, 273054129, SERVO2_FUNCTION, 34
PARM, 273054211, SERVO3_MIN, 1102
PARM, 273054293, SERVO3_MAX, 1927
PARM, 273054419, SERVO3_TRIM, 1105
PARM, 273054665, SERVO3_REVERSED, 0
PARM, 273054777, SERVO3_FUNCTION, 35
PARM, 273054864, SERVO4_MIN, 1102
PARM, 273054955, SERVO4_MAX, 1927
PARM, 273055191, SERVO4_TRIM, 1514
PARM, 273055310, SERVO4_REVERSED, 0
PARM, 273055473, SERVO4_FUNCTION, 36
Near the bottom of this wiki page for motor connections.
http://ardupilot.org/copter/docs/common-pixhawk-wiring-and-quick-start.html
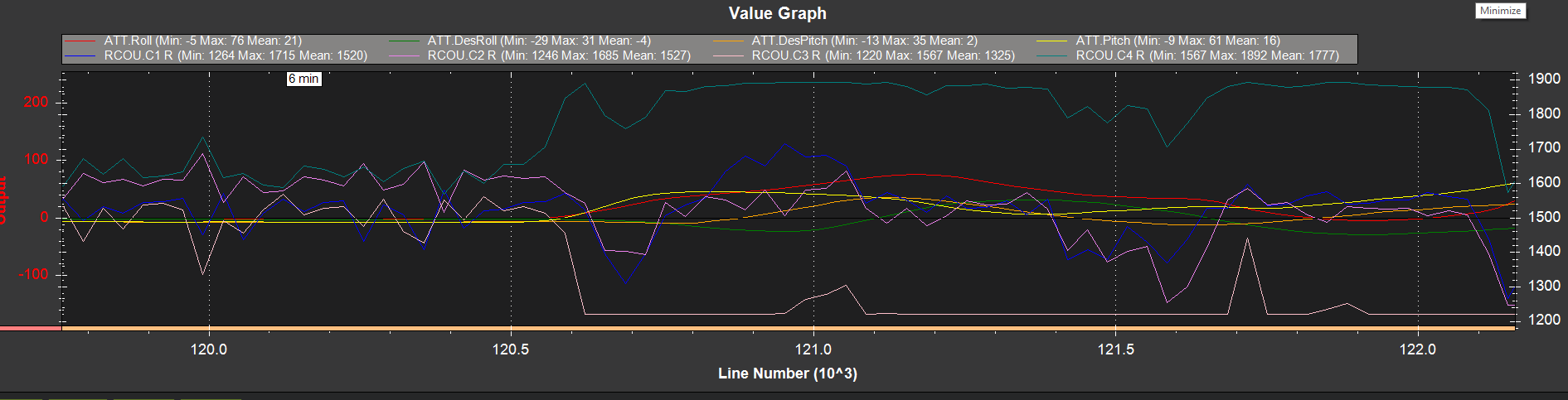
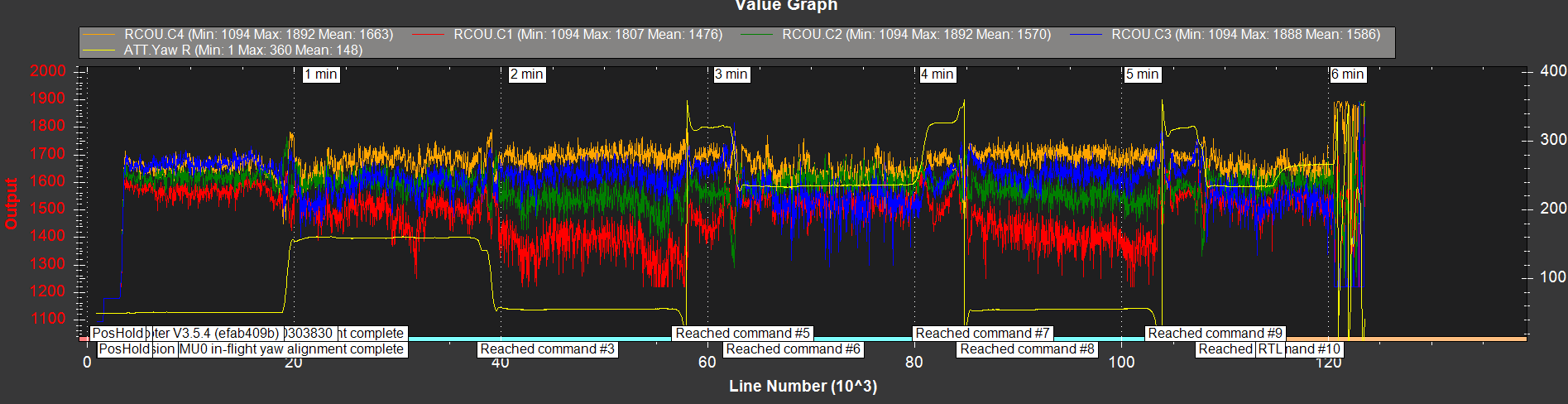
Really.RCOUT 1-4 are motors. RCIN 4 is yaw.
12S power supply,so big props ? Got any bullet connectors in line ? Specs of the motors and ESCs ?