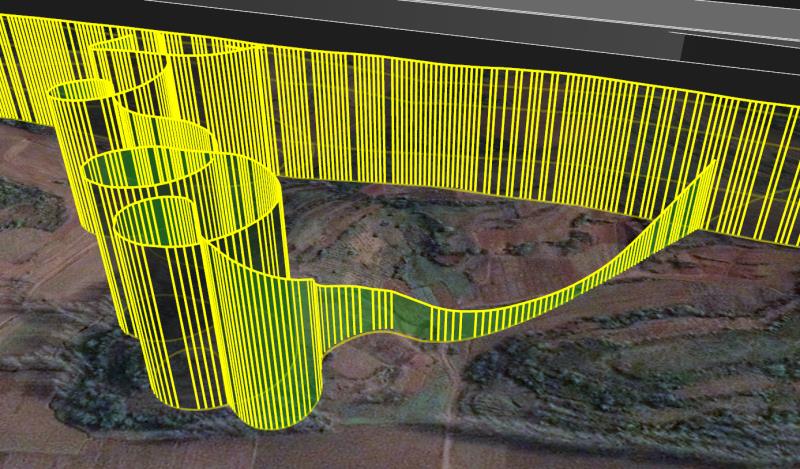
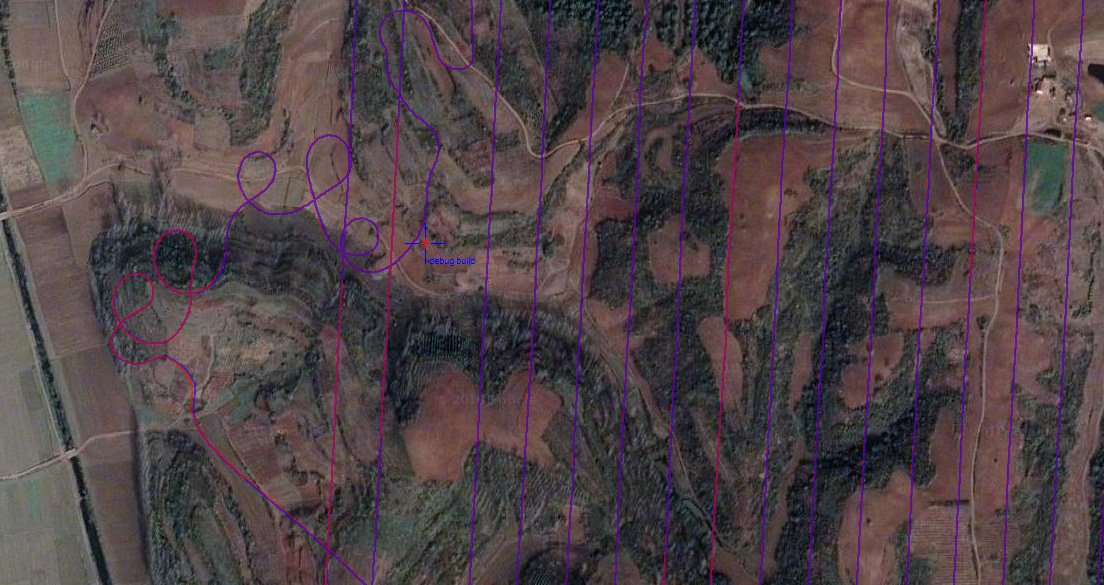
Its a long mission. The takeoff was normal, and during line 3 plane flew out the line and got crazy, almost crashed. Ive checked the log, did not find anything wrong. Someone help me to find the problem, please.
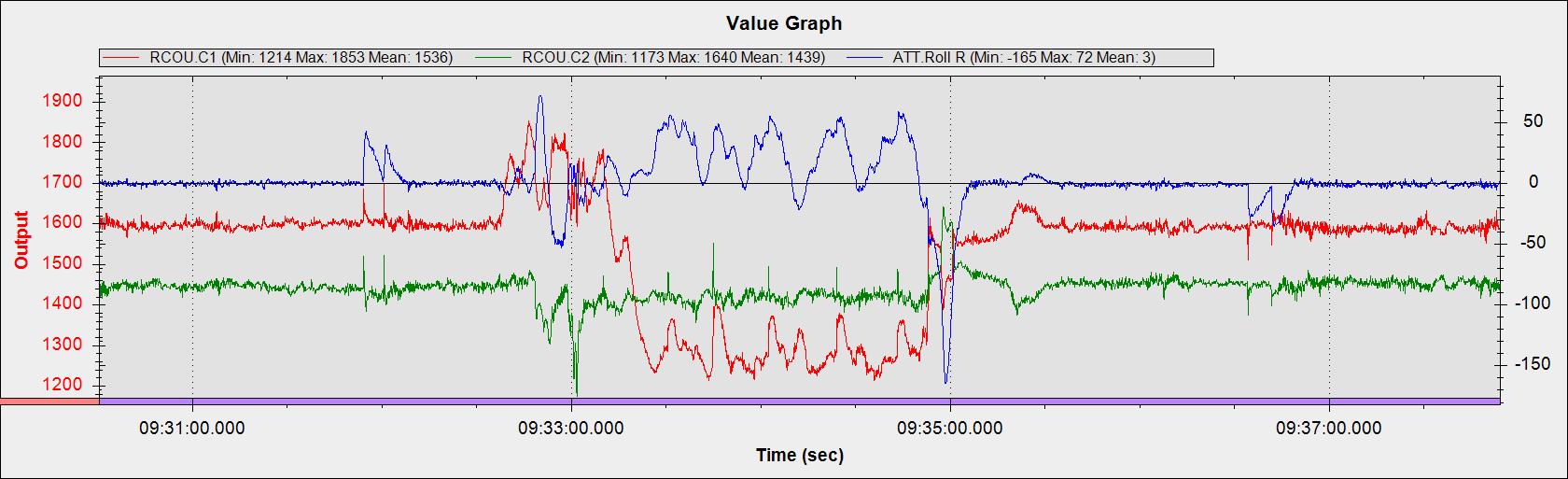
That´s easy. Just right-click the parameter you want to display with a second axis on the right.
The servo malfunction seems to be temporary, so perhaps it is a problem with the cable or the connection to the pixhawk. Try to move all electrical connections of the servo while you test it.