I have attached the link for the log files for those of you who can check them out and let me know your thoughts:
Data from LogAnalyzer:
Size (kb) 38169.55078125
No of lines 569342
Duration 0:02:08
Vehicletype ArduRover
Firmware Version V3.4.2
Firmware Hash 318a941d
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = NA -
Test: Brownout = UNKNOWN - No CTUN log data Test: Compass = WARN - WARN: Large compass offset params (X:-333.75, Y:109.57, Z:89.64) WARN: Large compass offset in MAG data (X:-333.00, Y:109.00, Z:89.00) mag_field interference within limits (5.61%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.25, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = NA -
Test: NaNs = GOOD -
Test: OpticalFlow = FAIL - ‘FLOW_FXSCALER’ not found
Test: Parameters = GOOD -
Test: PM = NA -
Test: Pitch/Roll = NA -
Test: Thrust = NA -
Test: VCC = UNKNOWN - No CURR log data
Considering there has been a warning stated in the LogAnalyzer which I have highlighted the rovers performance was impressive to say the least, So im not sure why this warning has been stated. But that aside I was very happy with the auto mission.
Thanks to all of you who have helped me get this far with my project and I look forward to your analysis on the log files.
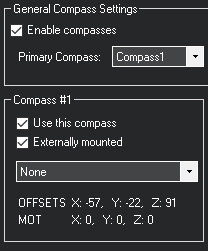
I know you have said you have disabled compass 2 but it’s not. COMPASS_USE2 is still set to 1.
Those new compass offsets for Compass 1 are excellent. I’m surprised they are so low actually. Now if you actually do disable compass 2 you may solve your warning problems. That said there are no warnings in the log. I wouldn’t bother with the Log Analyzer. That tool hasn’t been updated in quite awhile and is not that relevant. I have seen some posts where it’s on the To-Do list for the Dev’s to update it.
You should turn on battery logging. It may help diagnose a problem at some point and you need it to calibrate the current consumption.
The throttle response looks pretty good but I find it hard to believe that a cruise speed of 1 m/s requires 50% throttle. You didn’t run throttle learning and are driving the mission speed at the cruise speed? That’s not the right way to do it. Run throttle learn and then set the waypoint speed with the WP_SPEED parameter.
I see you are still on Rover 3.4.2. I would update to 3.5 it’s the current stable. But nice work overall, performance looks pretty good.
Yea, something not right there. 1.4 m/s at full throttle in Manual mode. My Crawler/Rover goes ~4.5 m/s at full throttle which I would think is typical.
The point I was making was that the Cruise Throttle parameter is still at default indicating the 1st step in tuning a rover probably wasn’t done and that the use of Cruise Speed for setting Mission speed is incorrect.
Next mission you do try doing 45 to 90 or 135 degree turns in different directions. its hard to tell how dialed in the steering is when you are doing 180 degree turns. I noticed a few sudden drops in the Vcc. Are you using a dedicated power module for the Pixhawk? For some reason you have a slow rover and the CRUISE_THROTTLE should be set to 80 percent for a cruise speed of 1 M/S.
The parameters for throttle & steering are off because I copied some of your parameters you sent me to try out and didn’t change them back. It’s ok I can do another steering and throttle tune up to take it back to its original settings. My mistake I forgot to change it back.
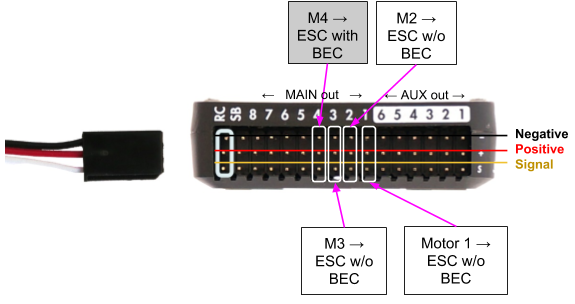
I’m not using a dedicated power module for the pixhawk & I know you will all tell me off for that one. The power is coming from the ESC of the rover & going into Main Output 3:
It’s a rover so its not going to drop out of the sky but you should use a power module. Keep in mind that you would be able to monitor battery voltage, amp usage, and make the rover take action if battery becomes low.
What I need to do is get a lipo battery with an XT60 adapter so I can plug it into the other end of the power module. Right now I have a NiMH battery. Unless I disconnect the Tamiya cable and solder on an XT60.
Then solder on an XT60. It’s the 1st thing I did when I got my truck. Or buy an adapter.
Note: It’s a bad idea to copy another vehicles parameters. I posted those suggesting that you post yours so they can be compared not copied. But no harm done as David says it can’t fall from the sky! Doing that wilth a multirotor could have disastrous consequences.
Another thing I wanted to mention which made a huge difference in the performance of the auto mission was adjusting the following parameters in the Basic Tuning Tab:
Lat Acc Cntrl Period”) in increments of 0.5
Lat Acc Cntrl Damp”) by increments of 0.05 to improve navigation in tight courses
These two parameters drastically changed the tightness that my rover stuck to the waypoints. Just a heads up if you haven’t had a try.
If you over do it at a high value the rover shimmeys but if you tweak it down bit by bit the results are perfect.
@ktrussell Kenny if you haven’t tried tweaking these yet I suggest you have a try it really helped, even to the point where I’m considering not buying an RTK GNSS Module because it was that accurate
I have worked with those parameters but it has been so long since I ran my machine, i don’t recall my results. A big heavy machine responds so much slower that I probably wouldn’t see shimmying but it would still not control well. I am soon to be back in the grass cutting mode and will continue fine tuning. I really appreciate your sharing this.
Great to hear of your success!
I only had to bump the Control Period up by .5 as I recall. Default damping worked fine. This is tuning the L1 controller which is the last step is basic tuning.
I tuned Closed Loop controllers for almost 20yrs as a Test Engineer (Servo hydraulics, Electro-Dynamic shakers, environmental chambers, etc.) and I still find it challenging at times to tune these craft! Multirotors can be particularly challenging.
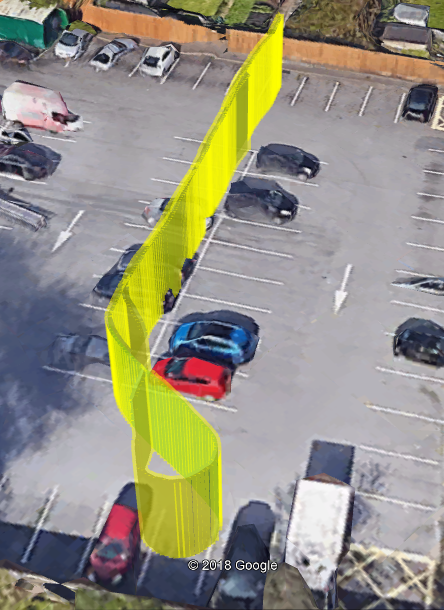
The vehicle was turning at the point of each way point exactly where I placed them on MP which was ideal for me. Plus I noticed that doing a dead straight line from waypoint 1-2 worked better than doing the same length of the waypoint and breaking it up like 1,2,3,4
When it comes to me transferring all my hardware over to the skid steer 4WD rover I’m receiving tomorrow, will things like WP radius need to be changed? Along with many other parameters or just for the steering? I’m hoping it’ll be straight forward
You mean TURN_RADIUS parameter not WP radius. One is vehicle specific the other is a Mission command. That said skid steering vehicles don’t have a Turn Radius. Pivot Turn is the tuning method.
For all intents that will be completely different vehicle.
@dkemxr , I have been a controls engineer, programming PLCs and tuning PIDs in a processing company for many years (not so much directly anymore though). I considered myself pretty good at tuning, until I met Ardupilot! I agree with you, there is a lot more to these things. I do like the cascade loop way that Ardupilot has the inner low-level loops (steering and throttle) and then builds the navigation on top of that. I just have a hard time completely understanding the units and what I am adjusting. (Sorry for off topic)